Lidar Slam Github
Arxiv Org Pdf 1808

Efficient Continuous Time Slam For 3d Lidar Based Online Mapping Youtube
Arxiv Org Pdf 1902

Github Polytechangersmecatroniqueclub Pa Slam Lidar Based Slam Ros Node
Dvl Slam Sparse Depth Enhanced Direct Visual Lidar Slam Springerlink

A Full Autonomous Stack A Tutorial Ros Raspberry Pi Arduino Slam Yorai
Simultaneous Localization and Mapping (SLAM) is a fundamental task to mobile and aerial robotics LiDAR based systems have proven to be superior compared to vision based systems due to its accuracy and robustness In spite of its superiority, pure LiDAR based systems fail in certain degenerate cases like traveling through a tunnel.

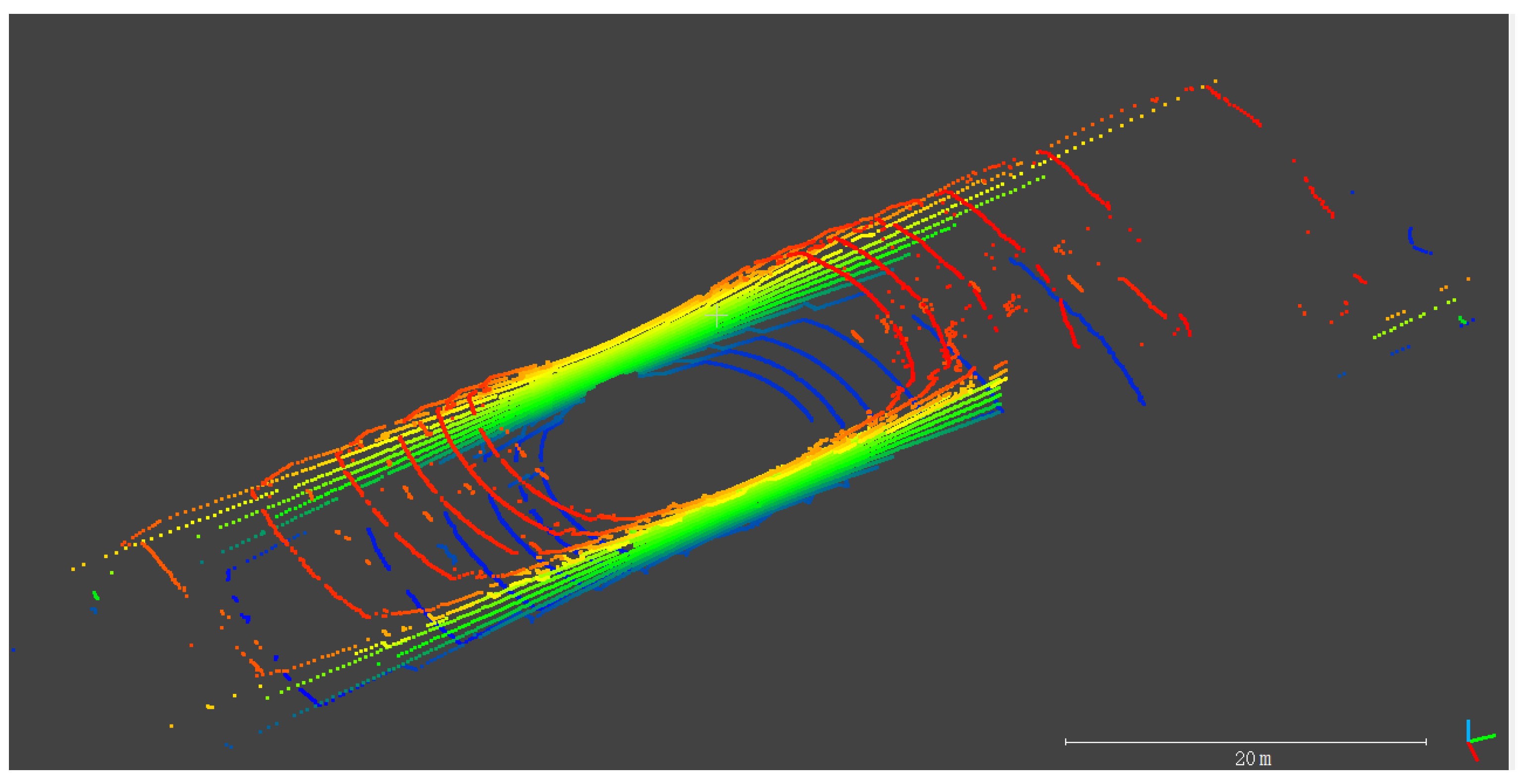
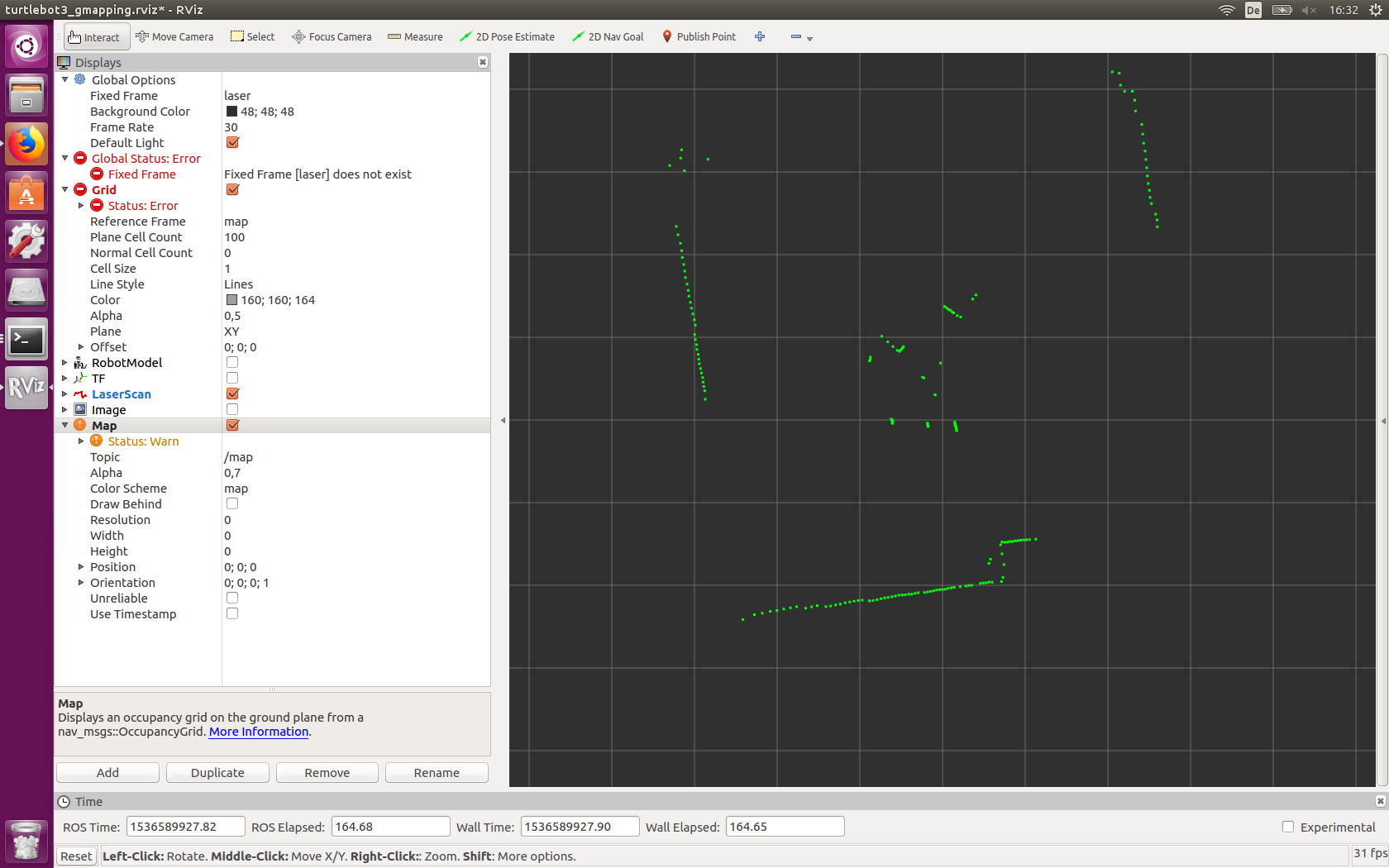
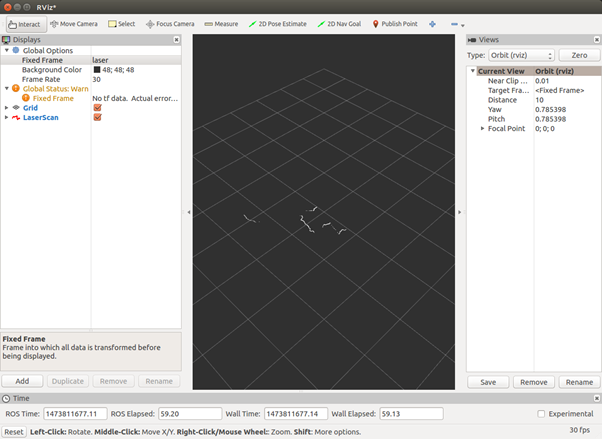
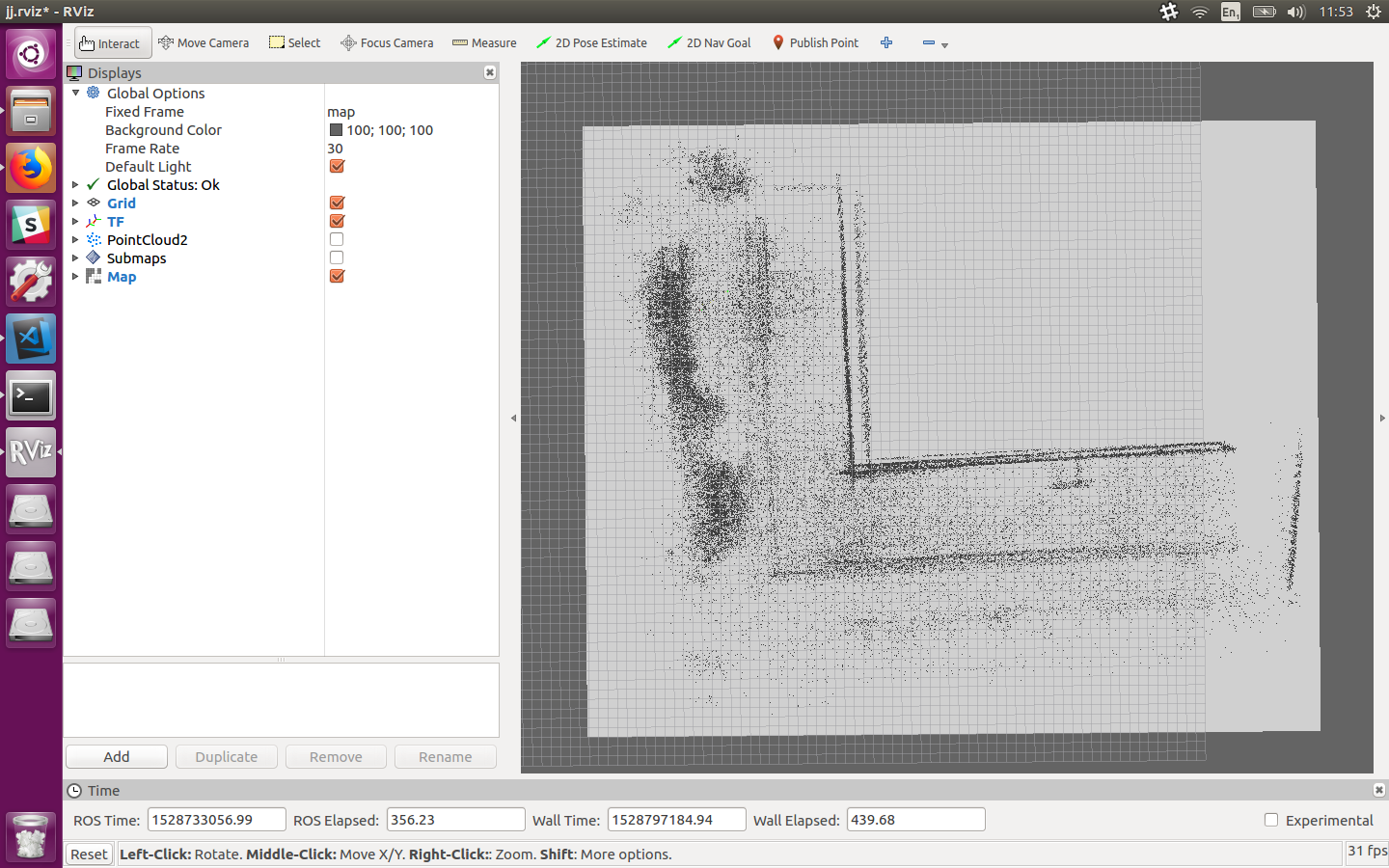
Lidar slam github. Robot SDK has integrated Cartographer for SLAM For details, please refer to here 2 Running the demo Terminal 1 Run MicroXRCEDDS Agent for OpenCR cd ~/turtlebot3 && MicroXRCEAgent serial /dev/ttyACM0 Terminal 2 Run MicroXRCEDDS Agent for Lidar cd ~/turtlebot3 && MicroXRCEAgent udp 18 Terminal 3 Run Lidar application. CV / Github / Google Scholar My research interest include SLAM, sensor fusion and computer vision I and my coauthors have proposed the first multiLiDAR SLAM system with online extrinsic calibration and multiLiDAR object detector with the awareness of extrinsic pertrubation. The main goal of SLAM is to construct and update a map of an unknown environment while simultaneously keeping track of the LiDAR’s location within it Velodyne’s Lidar sensors capture a full 360° 3D scan, up to times per second Each scan holds 16/32/64 scanlines, depending on the particular device.
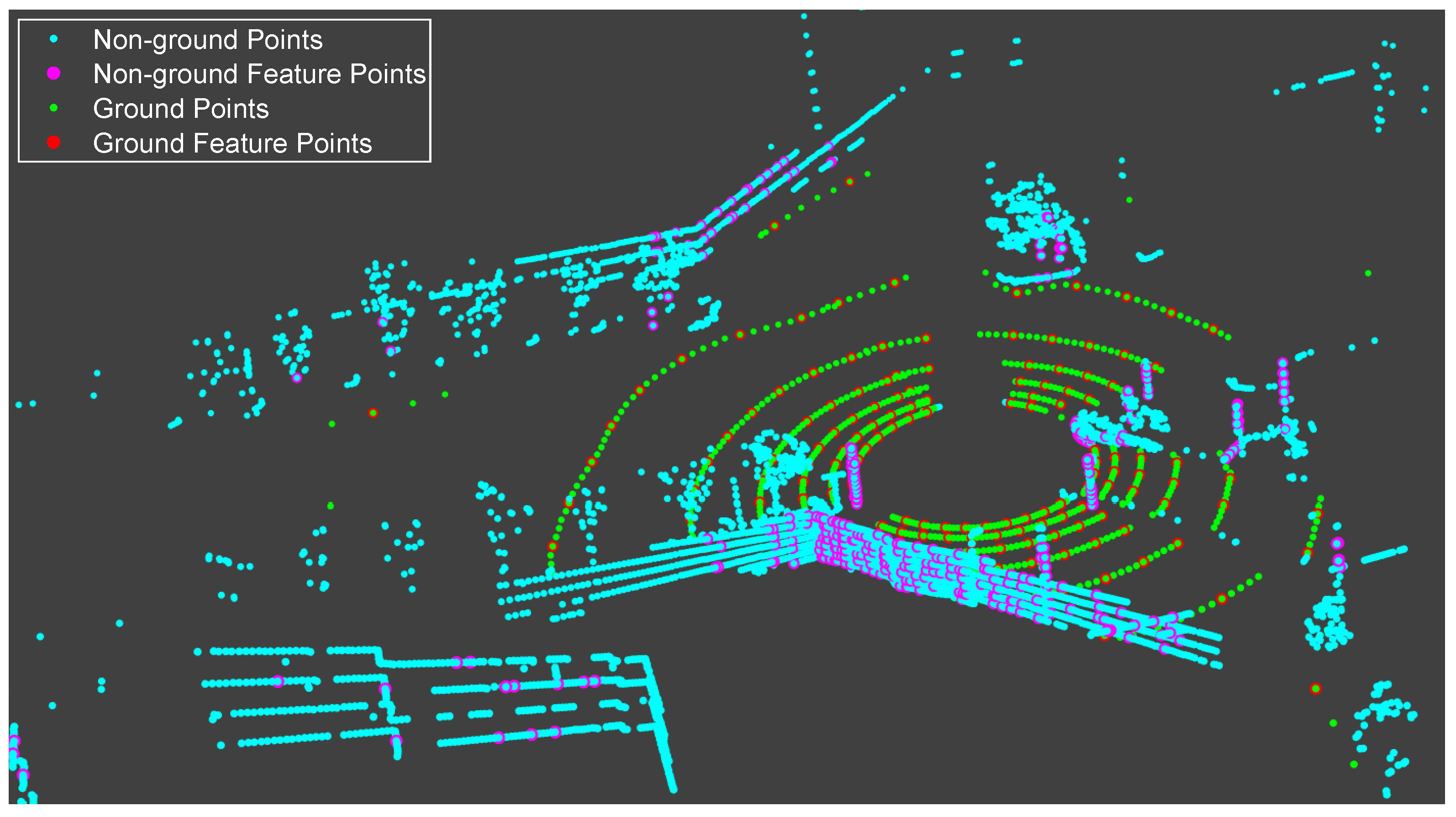
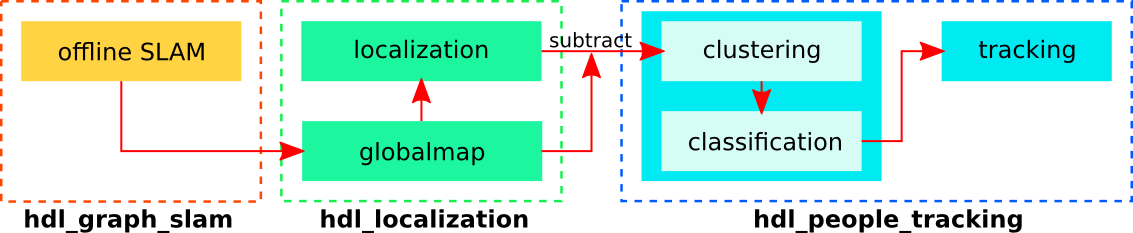
LiDAR inertial odometry to achieve accurate and smooth localization estimation To improve the performance of the LiDAR odometry, we incorporate inertial and LiDAR intensity cues into an occupancy grid based LiDAR odometry to enhance frametoframe motion and matching estimation Multiresolution. Fig 3 Fast SLAM hdl_graph_slam is an open source ROS package for realtime 3D slam using a 3D LIDAR It is based on scan matchingbased odometry estimation and loop detection It also utilizes floor plane detection to generate an environmental map with a completely flat floor. The dataset combines both built environments, open spaces and vegetated areas so as to test localization and mapping systems such as visionbased navigation, visual and LiDAR SLAM, 3D LIDAR reconstruction and appearancebased place recognition Welcome back to New College!.
University of California, BerkeleyOpen source code available at https//githubcom/eriknelson/blamRealtime 3D SLAM with a VLP16 LiDAR Point cloud resolu. The aim is to attach the LIDAR to the servo and enable a pitching motion for the LIDAR 52 Interfacing actuator with ROS The servo was made to rotate to the specified angle using ROS messages A ROS node called sweepcpp was created to perform 2700 sweep continuously with the servo The sweep node was successfully run on ROS. Abstract—Portable laser rangefinders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efficient method of acquiring asbuilt floor plans Generating and.
The goal of this series is to develop LIDARbased 2 dimensional SLAM Of course, numerous open source packages already exist for LIDAR SLAM but, as always, my goal is to understand SLAM on a fundamental level That’s why I’m building everything from scratch and taking a detailed look at the underlying math. Clone the github repository of RPLIDAR ROS package. It is a good learning material for SLAM beginners Must be set up ROS (Kinetic or Melodic) Ceres Solver;.
My research interests include generative models, model explainability, medical imaging, LiDAR/3D computer vision and autonomous vehicles I am currently working on unsupervised learning (generative models, disentanglement, domain adaptation), explainable models, AI for healthcare (disease classification/ segmentation) and robotics (LiDAR, SLAM). Comparison of CamVox with visual SLAM (VINSmono) and lidar SLAM (LOAM) are evaluated on the same dataset to demonstrate the performance We open sourced our hardware, code and dataset on GitHub. A StereoLidar SLAM System Leisheng Zhong, Tsinghua University Device StereoLidar SLAM Algorithm 3D Scene Reconstruction Static Scan Texture Mapping Dynamic Localization Dynamic Reconstruction Demo Video youtube/youku tereo Pose T Visual Odometry ose rame o ap Re stration Map omt ou Fusion n so idar Poin n so e Frame 1 ar om.
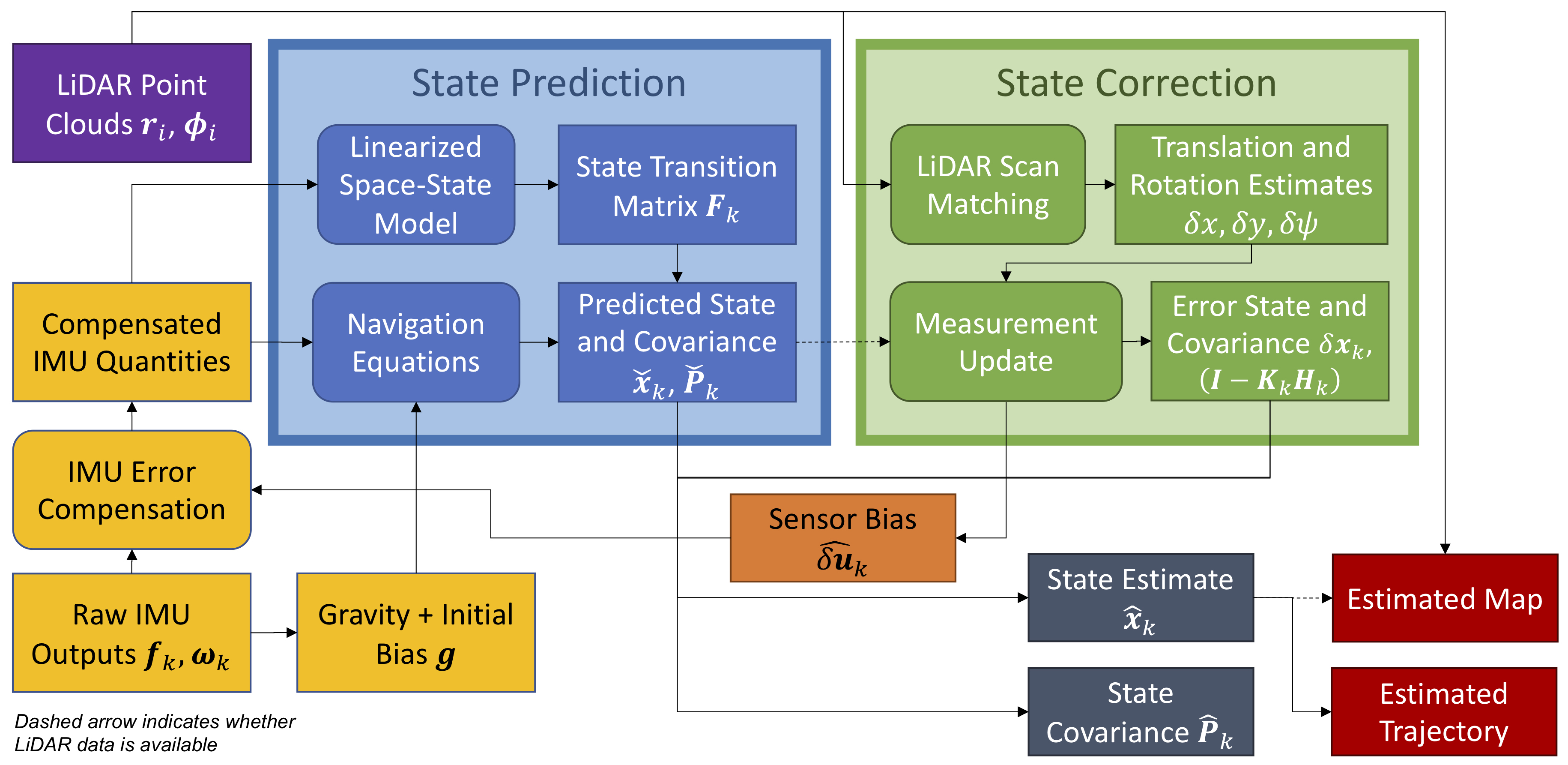
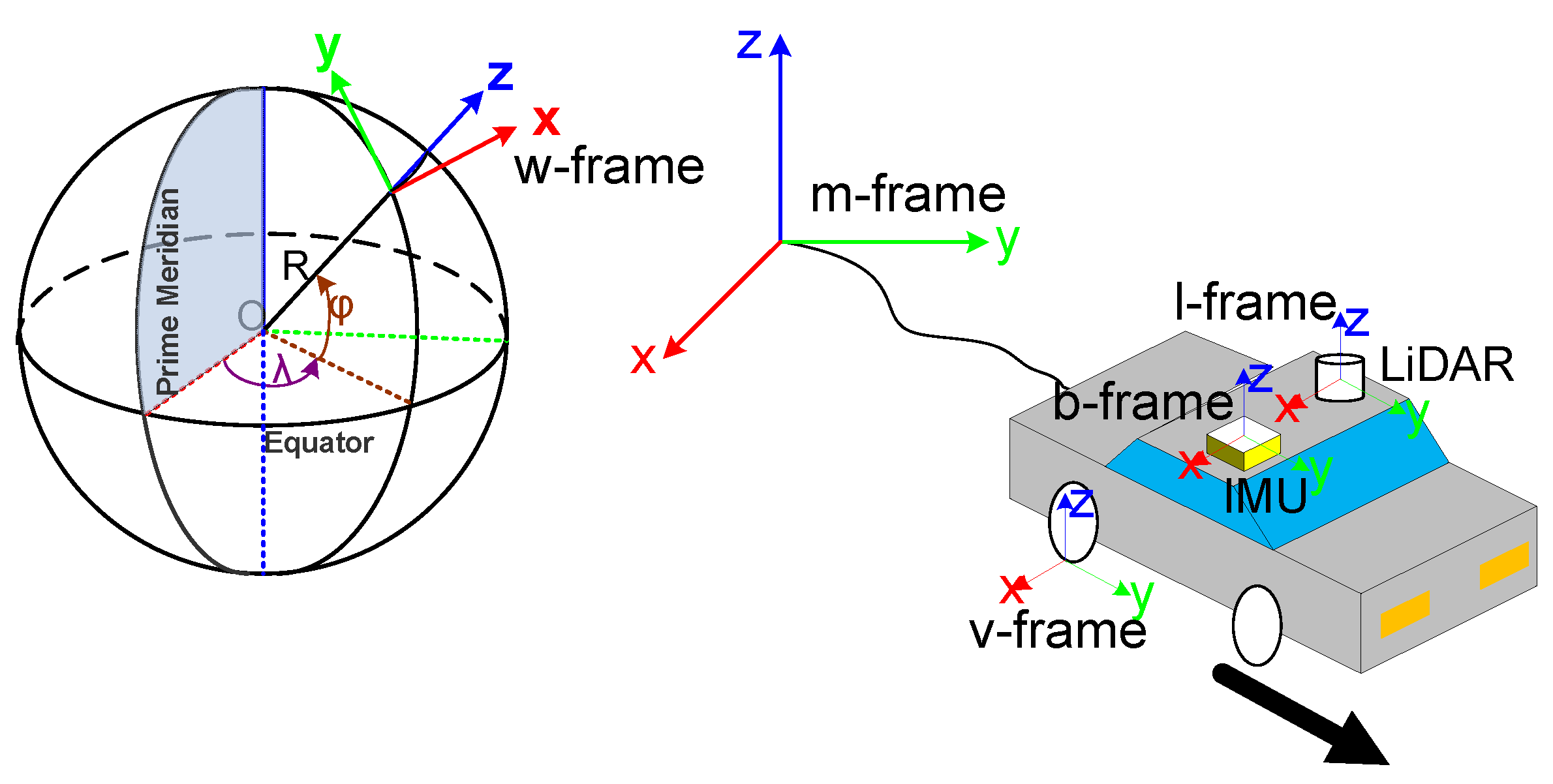
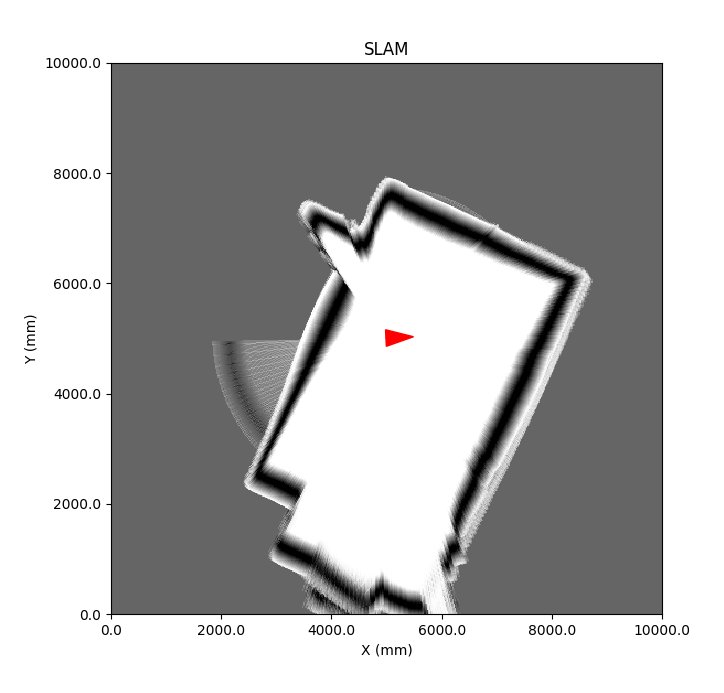
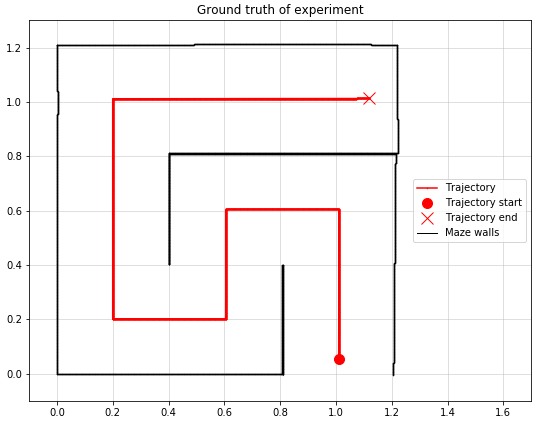
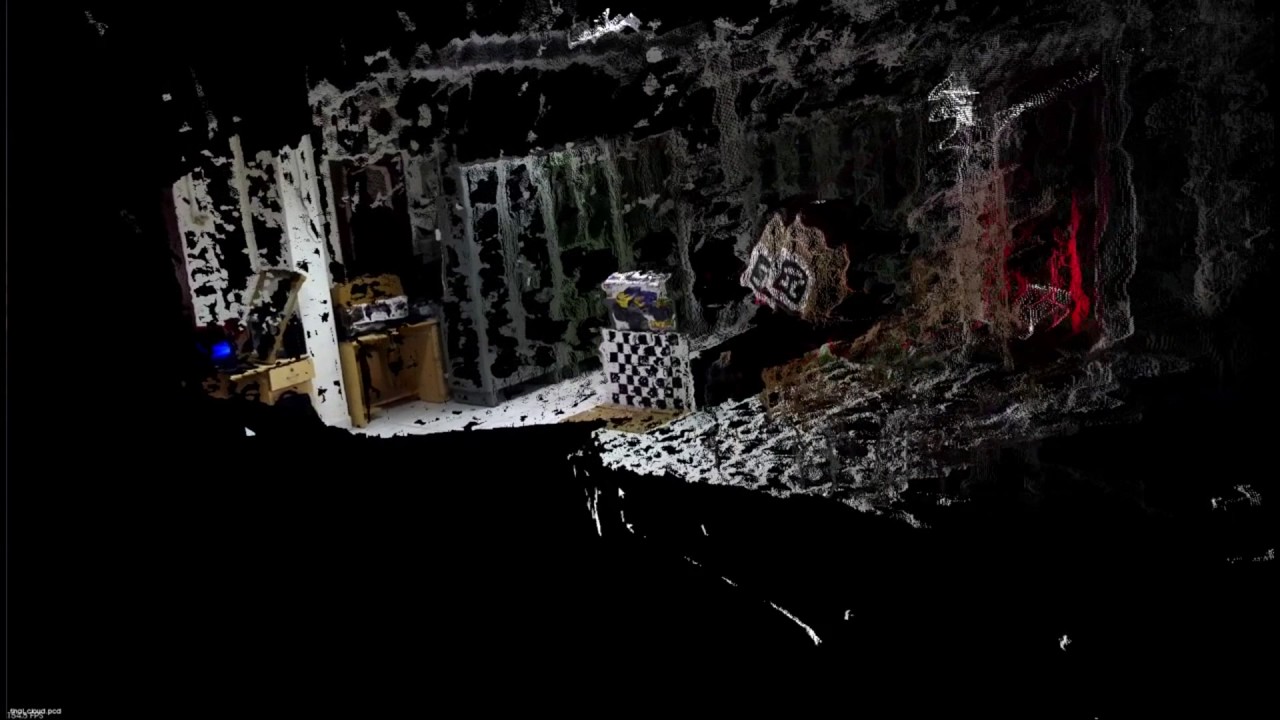
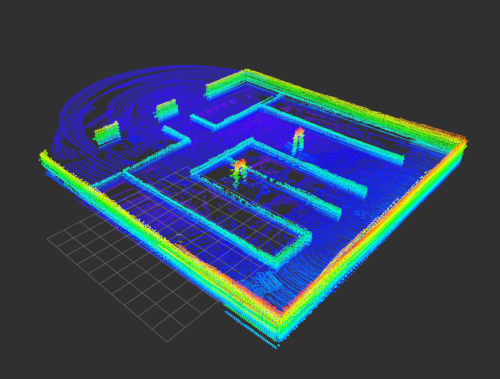
SLAM, Computer vision, Ubuntu, Software Menu SLAM In robotic mapping, simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent’s location within it. Simultaneous Localization and Mapping (SLAM) is a fundamental task to mobile and aerial robotics LiDAR based systems have proven to be superior compared to vision based systems due to its accuracy and robustness In spite of its superiority, pure LiDAR based systems fail in certain degenerate cases like traveling through a tunnel. SLAM (Simultaneous Localization And Mapping) enables accurate mapping where GPS localization is unavailable, such as indoor spaces SLAM algorithms use LiDAR and IMU data to simultaneously locate the sensor and generate a coherent map of its surroundings.
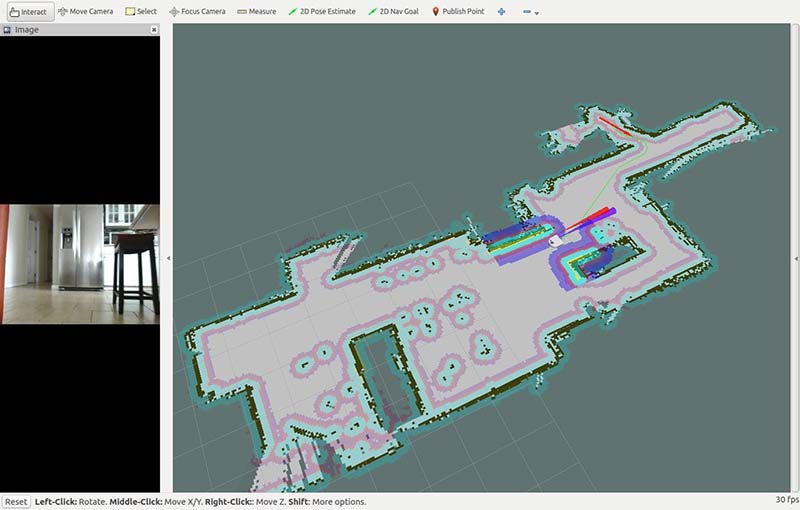
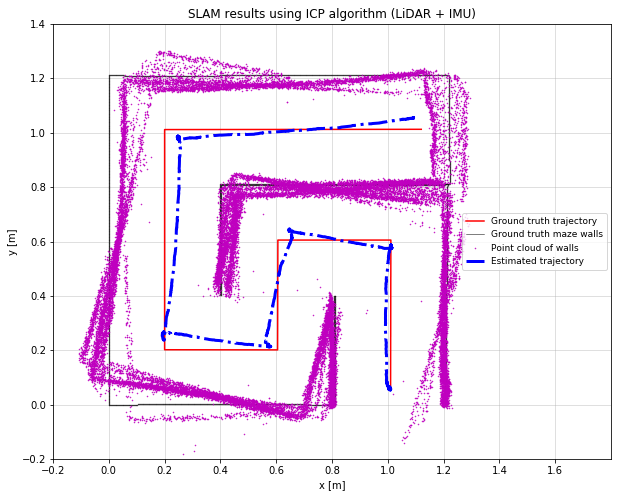
Lidar to grid map This example shows how to convert a 2D range measurement to a grid map kmeans object clustering This is a 2D object clustering with kmeans algorithm Rectangle fitting This is a 2D rectangle fitting for vehicle detection SLAM Simultaneous Localization and Mapping(SLAM) examples Iterative Closest Point (ICP) Matching. The LiDAR Inertial SLAM I created in this article is a combination of ndt/gicp sequential SLAM and graphbased SLAM In creating the LiDAR Inertial SLAM, I modified the sequential SLAM part from. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map.
LidarSLAM Libraries Hector SLAM was developed for a system capable of autonomous exploration in Urban Research and Rescue envi ronments It serves as a general opensource algorithm, which only needs minor modifications to operate on a given platform. SuMa Efficient LiDARbased Semantic SLAM, Proc of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 19 Abstract — Reliable and accurate localization and mapping are key components of most autonomous systems. LSDSLAMの概念・使い方 GitHub にすべて書いてあります。英語です。 インストールして実行するだけなら、コマンドを読むだけでなんとかなるかもしれません。 LSDSLAM on GitHub uvc_camera Webカメラから動画を取得して実行する際に必要です。.
Good news is that many people have a copy of that already) CSIRO's recent work combines IMU,2D LiDAR, camera, encoder and the related paper will be released soon at RAL This category of SLAM is called Continuoustime SLAM If you are writing a paper, here is one of the latest CTSLAM paper Please, cite this). More than 50 million people use GitHub to discover, fork, and contribute to over 100 million projects Add a description, image, and links to the lidarslam topic page so that developers can more easily learn about it Curate this topic Add this topic to your repo To associate your repository with. Github 1 I INTRODUCTION With the capacity of estimating the 6 degrees of freedom (DOF) state, and meanwhile building the high precision maps of surrounding environments, SLAM methods using LiDAR sensors have been regarded as an accurate and reliable way for robotic perception In the past years, LiDAR odometry.
I wrote a program for Graph SLAM using 3D LiDAR in ROS2 The code I wrote is on Github of 3D LIDARbased Localization using the static map li_slam_ros2 — A lidar inertial slam version of. SLAM using 2D lidar Contribute to meyiao/LaserSLAM development by creating an account on GitHub. Hdl_graph_slam is an open source ROS package for realtime 3D slam using a 3D LIDAR It is based on scan matchingbased odometry estimation and loop detection It also utilizes floor plane detection to generate an environmental map with a completely flat floor This package can be used in both indoor and outdoor environments.
Hector_mapping is a SLAM approach that can be used without odometry as well as on platforms that exhibit roll/pitch motion (of the sensor, the platform or both) It leverages the high update rate of modern LIDAR systems like the Hokuyo UTM30LX and provides 2D pose estimates at scan rate of the sensors (40Hz for the UTM30LX). Using visionbased and lidarbased sensing, great efforts have been devoted to achieving highperformance realtime simultaneous localization and mapping (SLAM) that can support a mobile robot’s six degreeoffreedom state estimation Visionbased methods typically use a monocular or stereo camera and triangulate features across successive. In this work, we are working toward a general Simultaneous Localization and Mapping (SLAM) solution that fully leverages the advantages of Lidar and Stereo Camera, has constant computation time (realtime) and linear in storage space, and utilizes efficient map representation which will be fully 3D and capable of representing arbitrary 3D.
The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map. INTRODUCTION With the ability of localizing positions and constructing local maps, simultaneous locomotion and mapping (SLAM) using sensors like camera, IMU, LiDAR, etc, are serving as the pillars for missions in autonomous driving, eld sur vey and 3D reconstruction. Using visionbased and lidarbased sensing, great efforts have been devoted to achieving highperformance realtime simultaneous localization and mapping (SLAM) that can support a mobile robot’s six degreeoffreedom state estimation Visionbased methods typically use a monocular or stereo camera and triangulate features across successive.
Online Robust SlidingWindowed LiDAR SLAM in Natural Environments (arXivv1 csRO) https//ifttt/3qxmoSa Despite the growing interest for autonomous environmental monitoring, effective SLAM realization in native habitats re. The use of SLAM has been explored previously in forest environments using 2D LiDAR combined with GPS (Miettinen et al, 07) as well as small footprint LiDAR, IMU, and GPS for 2D SLAM (Tang et al, 15) The goal of this paper was to test graphSLAM for mapping of a forested environment using a 3D LiDARequipped UGV. Highest SLAM localisation accuracy 2mm at 1 sigma;.
Citation If you use this dataset in your research, please cite this paper. (SLAMを自作した話は「ROS2で3D LiDARを用いたGraph SLAMによる三次元地図作成」をご覧ください。) Github 作ったSLAMで出来た地図 LiDAR Inertial SLAMとは LiDAR Inertial SLAMはその名の通り、IMUを複合したLidar SLAMです。 「Lidar SLAMは基本IMU複合してないのか?. ROS and Hector SLAM for NonGPS Navigation¶ This page shows how to setup ROS and Hector SLAM using an RPLidar lidar to provided a local position estimate for ArduPilot so that it can operate without a GPS These instructions were tested on an NVidia TX2 flashed with APSync and then ROS and MAVROS were installed as described here They were also tested on an RaspberryPi 3 B with ROS and.
For more details for each algorithm please refer to. Localization with slam_toolbox (INCOMPLETE) Repeat steps 14 of localization with AMCL package We need to modify the params yaml file that is passed to the slam_toolbox package The original config dir is located at slam_toolbox/config I moved the config directory under turltebot2_lidar for easy modification. S visual SLAM, LiDAR SLAM;.
Online Robust SlidingWindowed LiDAR SLAM in Natural Environments (arXivv1 csRO) https//ifttt/3qxmoSa Despite the growing interest for autonomous environmental monitoring, effective SLAM realization in native habitats re. LINSLiDARinertialSLAM This repository contains code for a tightlycoupled lidarinertial odometry and mapping system for ROS compatible UGVs The reason of fusing IMU and Lidar in a tightlycouple scheme is to handle featureless environments where previous methods may fail This work is built upon LIOmapping, LeGOLOAM and LOAM. The main goal of SLAM is to construct and update a map of an unknown environment while simultaneously keeping track of the LiDAR’s location within it Velodyne’s Lidar sensors capture a full 360° 3D scan, up to times per second Each scan holds 16/32/64 scanlines, depending on the particular device.
Clickhere for Top 0 Raspberry pi project with 12 Categories https//wwwpantechsolutionsnet/blog/top0raspberrypiprojectsfinalyear/ In the above. RPLIDAR is a lowcost LIDAR sensor suitable for indoor robotic SLAM(Simultaneous localization and mapping) application It can be used in the other applications such as General robot navigation and localization;. How to Use Lidar in AirSim# AirSim supports Lidar for multirotors and cars The enablement of lidar and the other lidar settings can be configured via AirSimSettings json Please see general sensors for information on configruation of general/shared sensor settings.
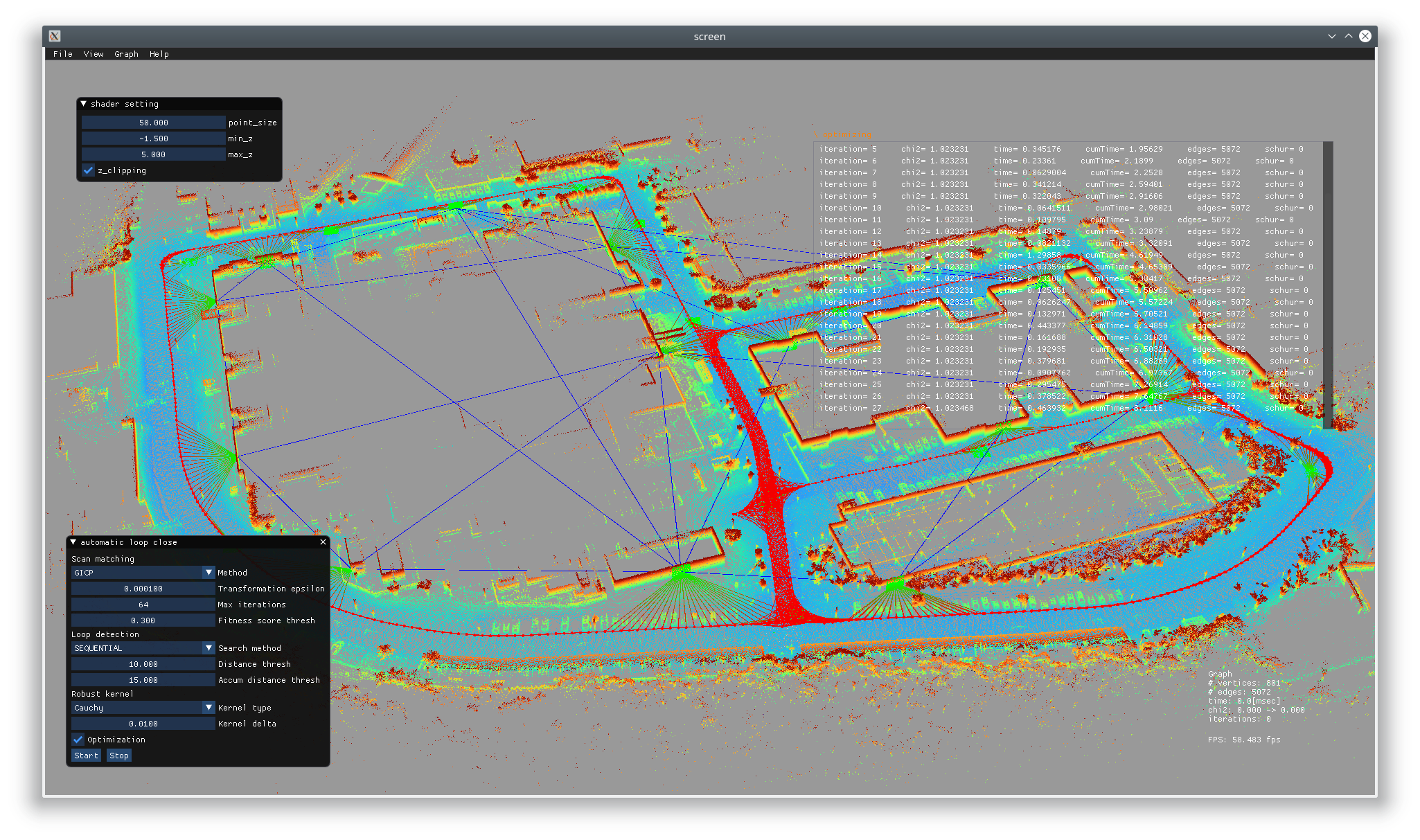
RPLIDAR is a lowcost LIDAR sensor suitable for indoor robotic SLAM application The produced 2D point cloud data can be used in mapping, localization and object/environment modeling RPLIDAR will be a great tool using in the research of SLAM (Simultaneous localization and mapping) Right now, there are three kinds of RPLIDAR for different features. First SLAM autostitching, 16 place recognition and merging system In trials Only 3D spinning lidar system based on passive actuation – Zebedee spring Patent ;. 3D LIDARbased Graph SLAM hdl_graph_slam is an open source ROS package for realtime 6DOF SLAM using a 3D LIDAR It is based on 3D Graph SLAM with NDT scan matchingbased odometry estimation and loop detection.
Good news is that many people have a copy of that already) CSIRO's recent work combines IMU,2D LiDAR, camera, encoder and the related paper will be released soon at RAL This category of SLAM is called Continuoustime SLAM If you are writing a paper, here is one of the latest CTSLAM paper Please, cite this). Realtime LiDAR SLAM Scan Context (18 IROS) LeGOLOAM (18 IROS) This repository is an example usecase of Scan Context C , the LiDAR place recognition method, for LiDAR SLAM applications;. Simultaneous Localization and Mapping (SLAM) is a fundamental task to mobile and aerial robotics LiDAR based systems have proven to be superior compared to vision based systems due to its accuracy and robustness In spite of its superiority, pure LiDAR based systems fail in certain degenerate cases like traveling through a tunnel.
Using visionbased and lidarbased sensing, great efforts have been devoted to achieving highperformance realtime simultaneous localization and mapping (SLAM) that can support a mobile robot’s six degreeoffreedom state estimation Visionbased methods typically use a monocular or stereo camera and triangulate features across successive. Robot SDK has integrated Cartographer for SLAM For details, please refer to here 2 Running the demo Terminal 1 Run MicroXRCEDDS Agent for OpenCR cd ~/turtlebot3 && MicroXRCEAgent serial /dev/ttyACM0 Terminal 2 Run MicroXRCEDDS Agent for Lidar cd ~/turtlebot3 && MicroXRCEAgent udp 18 Terminal 3 Run Lidar application. Online Robust SlidingWindowed LiDAR SLAM in Natural Environments (arXivv1 csRO) https//ifttt/3qxmoSa Despite the growing interest for autonomous environmental monitoring, effective SLAM realization in native habitats re.
Oxford VGG Datasets s visual features, visual recognition, 3D reconstruction;. Clickhere for Top 0 Raspberry pi project with 12 Categories https//wwwpantechsolutionsnet/blog/top0raspberrypiprojectsfinalyear/ In the above. LIDAR SLAM 19 hdl_graph_slam 3D LIDARbased Graph SLAM, realtime 6DOF SLAM using a 3D LIDAR 19, Advanced Robotic Systems, A Portable 3D LIDARbased System for Longterm and Widearea People Behavior Measurement, Advanced Robotic Systems PAPER LIOmapping ICRA 19,A Tightly Coupled 3D Lidar and Inertial Odometry and Mapping Approach.
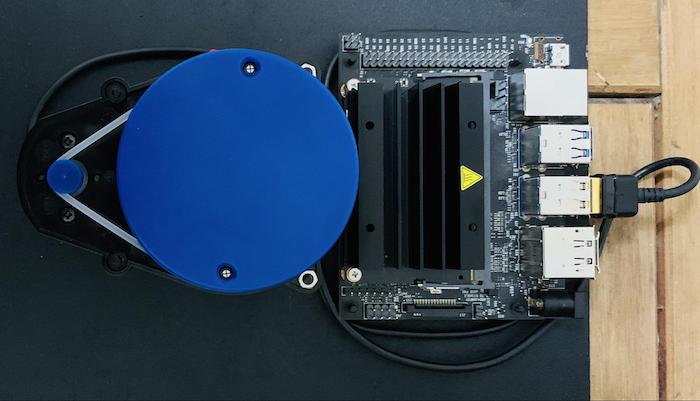
Computer Vision TUM CVG Datasets s visual(inertia) odometry, visual SLAM, 3D reconstruction;. Photo of the lidar installed at the Roomba The left board is Orange Pi PC running ROS nodes (Lidar node, Roomba node, Hector SLAM) All robot controlling was manual (using keyboard) The resulting map of the rooms This map was created with lidar working at 2 deg angular resolution mode Also I have published Firmware code and lidar ROS node. SCLeGOLOAM NEWS (Nov, ) A Scan Context integration for LIOSAM, named SCLIOSAM (link), is also released;.
Contribute to Slamtec/rplidar_ros development by creating an account on GitHub. CV / Github / Google Scholar My research interest include SLAM, sensor fusion and computer vision I and my coauthors have proposed the first multiLiDAR SLAM system with online extrinsic calibration and multiLiDAR object detector with the awareness of extrinsic pertrubation. EPFL CVLAB Datasets This page was generated by GitHub Pages.
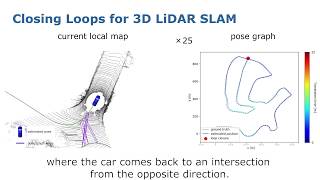
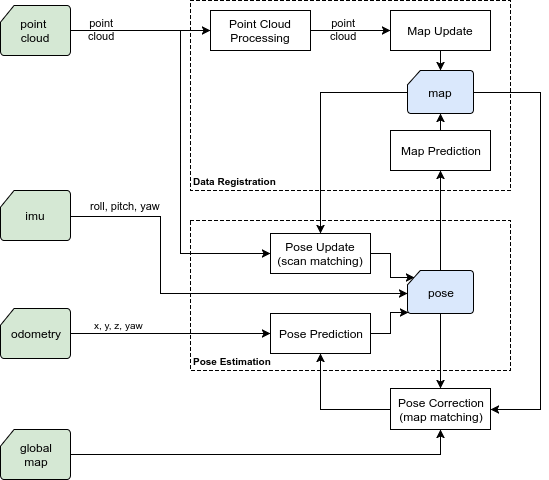
Simultaneous localization and mapping or SLAM 1, 29 is an integral part of most robots and autonomous cars Graphbased SLAM often relies on (i) pose estimation relative to a recent history, which is called odometry or incremental scan matching, and (ii) loop closure detection, which is needed for data association on a global scale.

Lego Loam Deep Slam

Lidar Integration With Ros Quickstart Guide And Projects Ideas

Github Koide3 Hdl Graph Slam 3d Lidar Based Graph Slam
Rgb D Orb Slam2 With A Depth Map Based On Lidar Data By Jeroen Zijlmans Medium

Autonomous Slam With A Roomba Hackaday Io
Arxiv Org Pdf 07 014
Introduction To Intel Realsense Visual Slam And The T265 Tracking Camera
Dvl Slam Sparse Depth Enhanced Direct Visual Lidar Slam Springerlink
Testing Lidar With Ros Details Hackaday Io

What Interesting Projects On Github Are Robots Drones Automatic Control Etc Programmer Sought
Veloview Kitwarepublic
Www Ri Cmu Edu Wp Content Uploads 19 07 Ms Thesis Ws Pdf

Autonomous Slam With A Roomba Hackaday Io
Lidar Inertial Slam On Ros2 Introduction By Ryohei Sasaki Medium
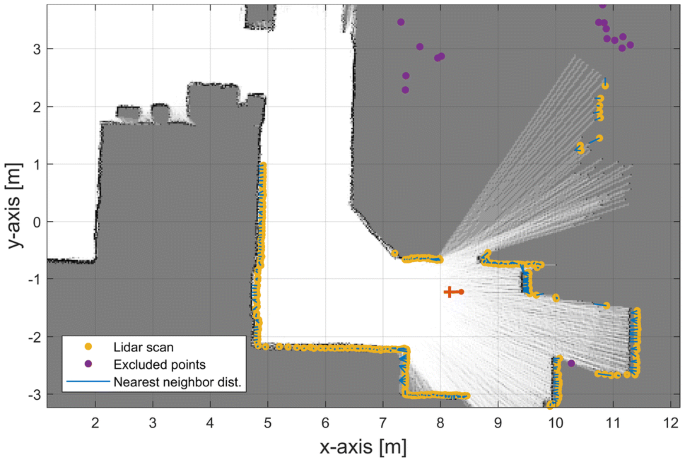
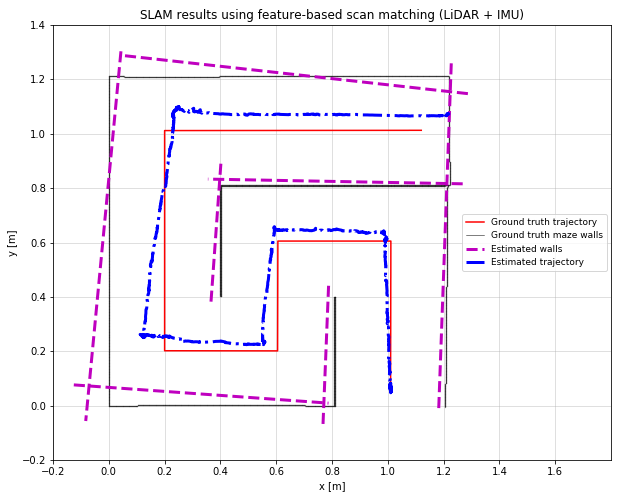
I Developed A 2d Lidar Slam Using Matlab
Slam Github Topics Github
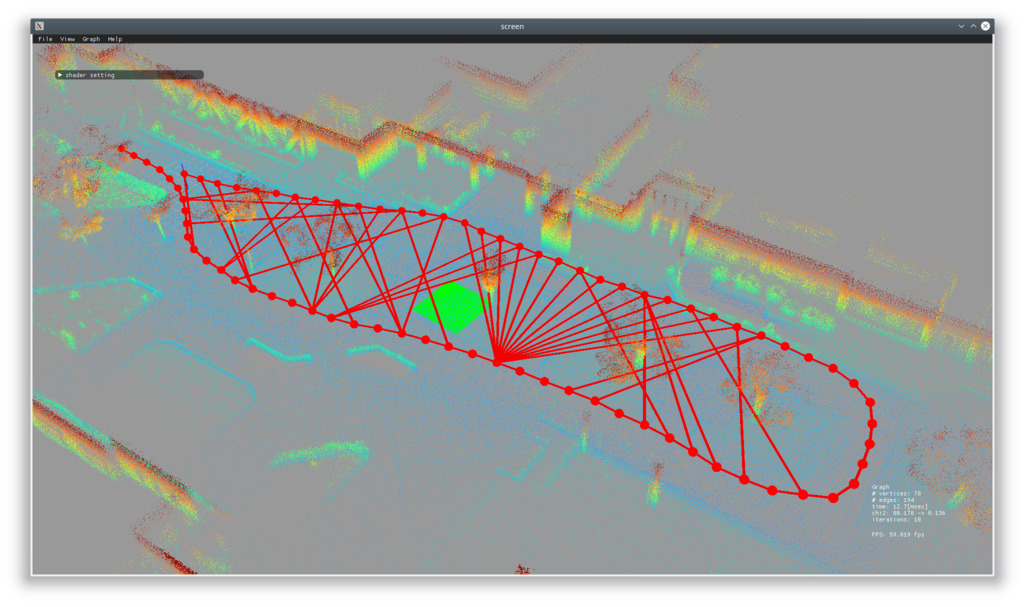
Github Smrt Aist Interactive Slam Interactive Map Correction For 3d Graph Slam
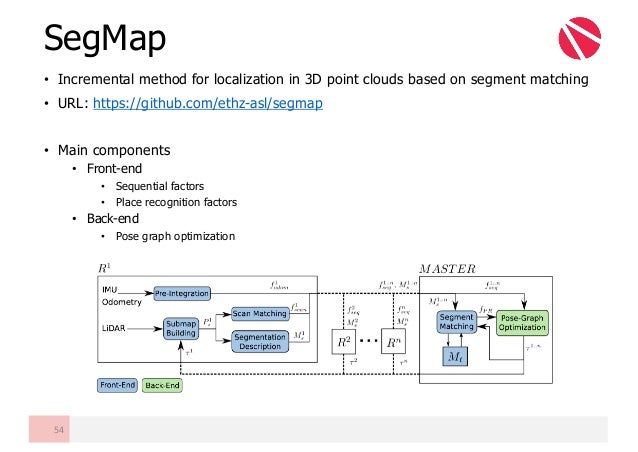
Fastcampus 18 Slam Workshop

Hands On With Slam Toolbox
Neato Ros Robot Navigation Servo Magazine

Lego Loam Lightweight And Ground Optimized Lidar Odometry And Mapping On Variable Terrain Youtube
Lidar Inertial Slam On Ros2 Introduction By Ryohei Sasaki Medium
Github Avirtuos Ros Hercules A Basic Autonomous Rover Built On Ros Indigo And Using Seeduino S Hercules Base With An Rplidar 360 For Mapping And An Nvidia Tegra Tx1 For Higher Level Robot Functions

An Easy Tutorial On Lidar Odometry Using Iterative Closest Pointbot Blog
Slam Github Topics Github
Slam Algorithms Github Topics Github
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data

Visual Odometry Github
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data
Rss Overlapnet Loop Closing For Lidar Based Slam By X Chen Et Al Youtube
Introductory Level Of Slam Seminar
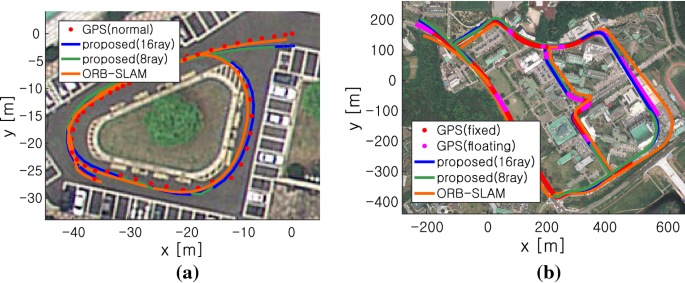
Sensors Free Full Text Gnss Imu Odo Lidar Slam Integrated Navigation System Using Imu Odo Pre Integration Html

Rapid Outdoor Indoor 3d Mapping With A Husky Ugv Clearpath Robotics

Rapid Outdoor Indoor 3d Mapping With A Husky Ugv Clearpath Robotics
Ros And Hector Slam For Non Gps Navigation Dev Documentation

Summary Slam Excellent Open Source Project Programmer Sought

3d Mapping With Graph Slam Using Lidar In Ros2 By Ryohei Sasaki Medium
Sensors Free Full Text Gnss Imu Odo Lidar Slam Integrated Navigation System Using Imu Odo Pre Integration Html
Slam Github Topics Github
Turtlebot3 Lidar Slam No Map Received Issue 307 Robotis Git Turtlebot3 Github
Chris Anderson Simon Levy S Amazing Breezyslam Python Slam Code Which Works On Raspberrypi And Doesn T Require Ros Now Supports The Equally Amazing 99 Rp Lidar A1 Lidar Perfect For Diyrobocars T Co Vd3zt2szmh

Github Anthonymonori Hector Slam Wreck 2d Mapping Using Lidar Lite Laser And Slam Technology
Github Cartographer Project Cartographer Cartographer Is A System That Provides Real Time Simultaneous Localization And Mapping Slam In 2d And 3d Across Multiple Platforms And Sensor Configurations
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data
Lidar Integration With Ros Quickstart Guide And Projects Ideas
Sensors Free Full Text Gnss Imu Odo Lidar Slam Integrated Navigation System Using Imu Odo Pre Integration Html

Pdf Lips Lidar Inertial 3d Plane Slam
Github Smrt Aist Interactive Slam Interactive Map Correction For 3d Graph Slam
Lidar Point Cloud Github Topics Github

3d Mapping With Graph Slam Using Lidar In Ros2 By Ryohei Sasaki Medium

Github Jacktoaster Lidar Slam Using The Breezyslam Library To Run Slam Simultaneous Localization And Mapping With Data From A Lidar Sensor Currently Runs Off Of A Simulated Lidar Output
Mapperbot Iscan Open Source Integrated Robotic Platform And Algorithm For 2d Mapping Springerlink
Slam Github Topics Github
3d Slam With Rotating Laser On A Drone Issue 1134 Cartographer Project Cartographer Github

Intel Realsense 3d Camera For Robotics Slam With Code Robots For Roboticists

Odroid Powered Lidar This Is A Follow Up From My Neato Lidar By Tom Jacobs Australian Robotics Society Medium

Github Chaoqinrobotics Lins Lidar Inertial Slam A Lidar Inertial State Estimator For Robust And Efficient Navigation Based On Iterated Error State Kalman Filter
Slam Github Topics Github

Opensource Lidar Slam Benchmarking Github

Imaginghub Blog Lidar Based 3d Slam For Autonomous Vehicles
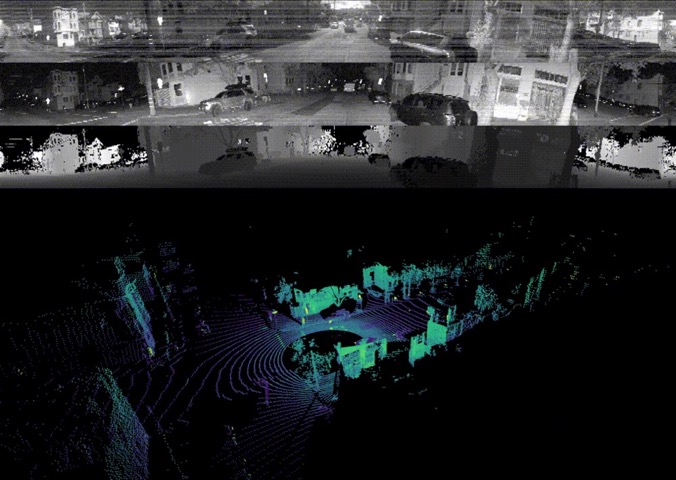
Ouster S Lidar Is A Camera Which Means Great Things For Deep Learning And Autonomy Spar 3d
Github Koide3 Hdl Graph Slam 3d Lidar Based Graph Slam

Ouster S Lidar Is A Camera Which Means Great Things For Deep Learning And Autonomy Spar 3d

A Full Autonomous Stack A Tutorial Ros Raspberry Pi Arduino Slam Yorai
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data

Veloview Lidar Slam Capabilities Kitware Blog
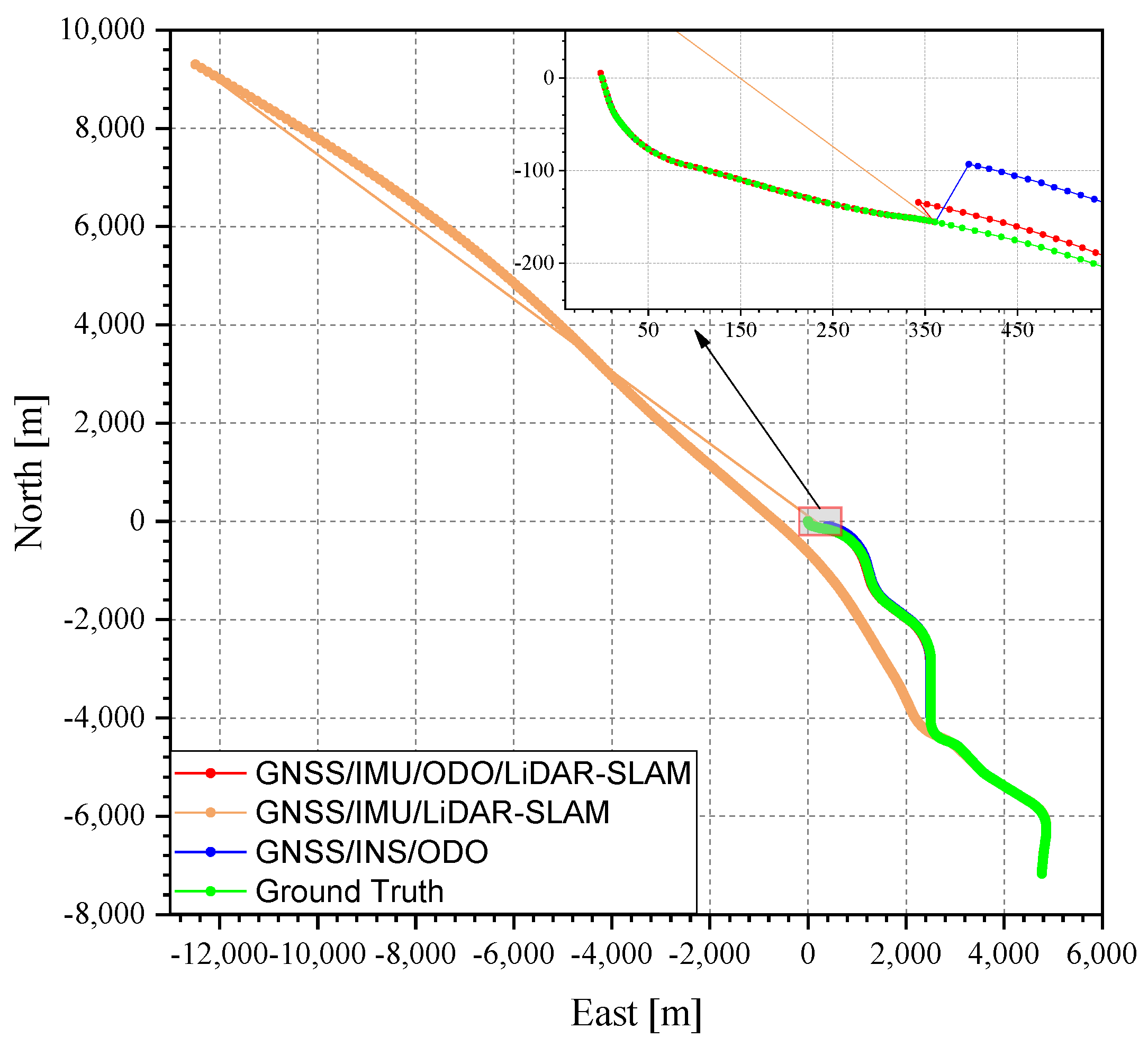
Sensors Free Full Text Gnss Imu Odo Lidar Slam Integrated Navigation System Using Imu Odo Pre Integration Html
Http Www Roseducation Org Ros18 Docs E6 9e 97 E6 B5 E9 8b 95 Hypharos Mpc Minicar Released Pdf

Wide Area Indoor And Outdoor Real Time 3d Slam Youtube
Lidar Integration With Ros Quickstart Guide And Projects Ideas
Slam 3d With Robosense Lidar Issue 524 Introlab Rtabmap Github

Lidar Inertial Slam On Ros2 Introduction By Ryohei Sasaki Medium
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data
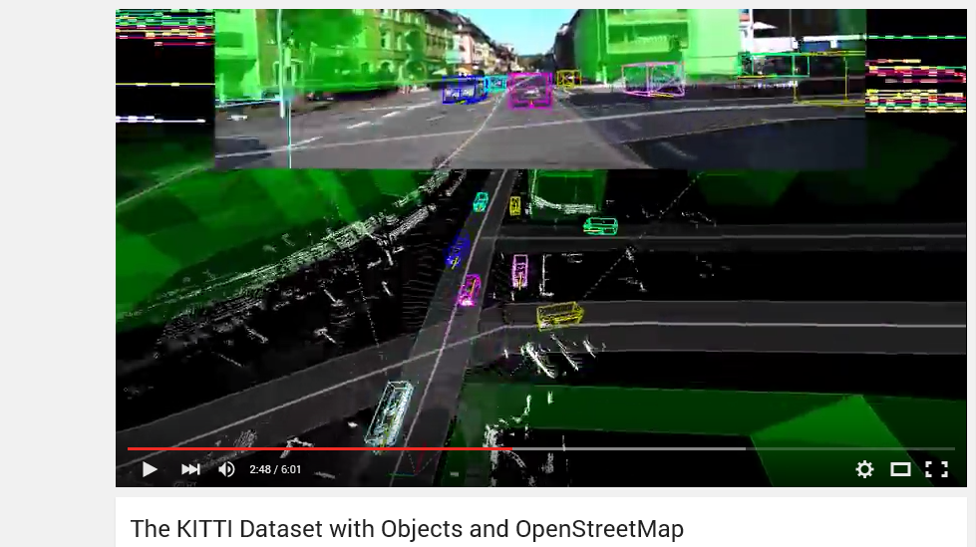
Hackathon Result No 7 Journey To Creating Drivenet Maps Open Data Real Time Road Maps For Autonomous Driving From 3d Lidar Point Clouds Sdi4apps

Pdf Camvox A Low Cost And Accurate Lidar Assisted Visual Slam System
Ouster Os 1 Lidar And Google Cartographer Integration
Github Geromidg Ga Slam Slam For Autonomous Planetary Rovers With Global Localization

Slam Your Robot Or Drone With Python And A 150 Lidar
Hdl Graph Slam

Imaginghub Blog Lidar Based 3d Slam For Autonomous Vehicles
Turtlebot3
Hdl Graph Slam
How To Use A Lidar Sensor With Robot Operating System Ros Ros Maker Pro

Summary Slam Excellent Open Source Project Programmer Sought
Real Time 3d Slam On Embedded System Jetson Tx2 With Velodyne Vlp 16 Youtube

Lidar Slam 3d Free Projects

Autonomous Uv Robot With Slam Arduino Project Hub
Http Www Ipb Uni Bonn De Wp Content Papercite Data Pdf Chen19iros Pdf

Ouster Os 1 Lidar And Google Cartographer Integration
Turtlebot3
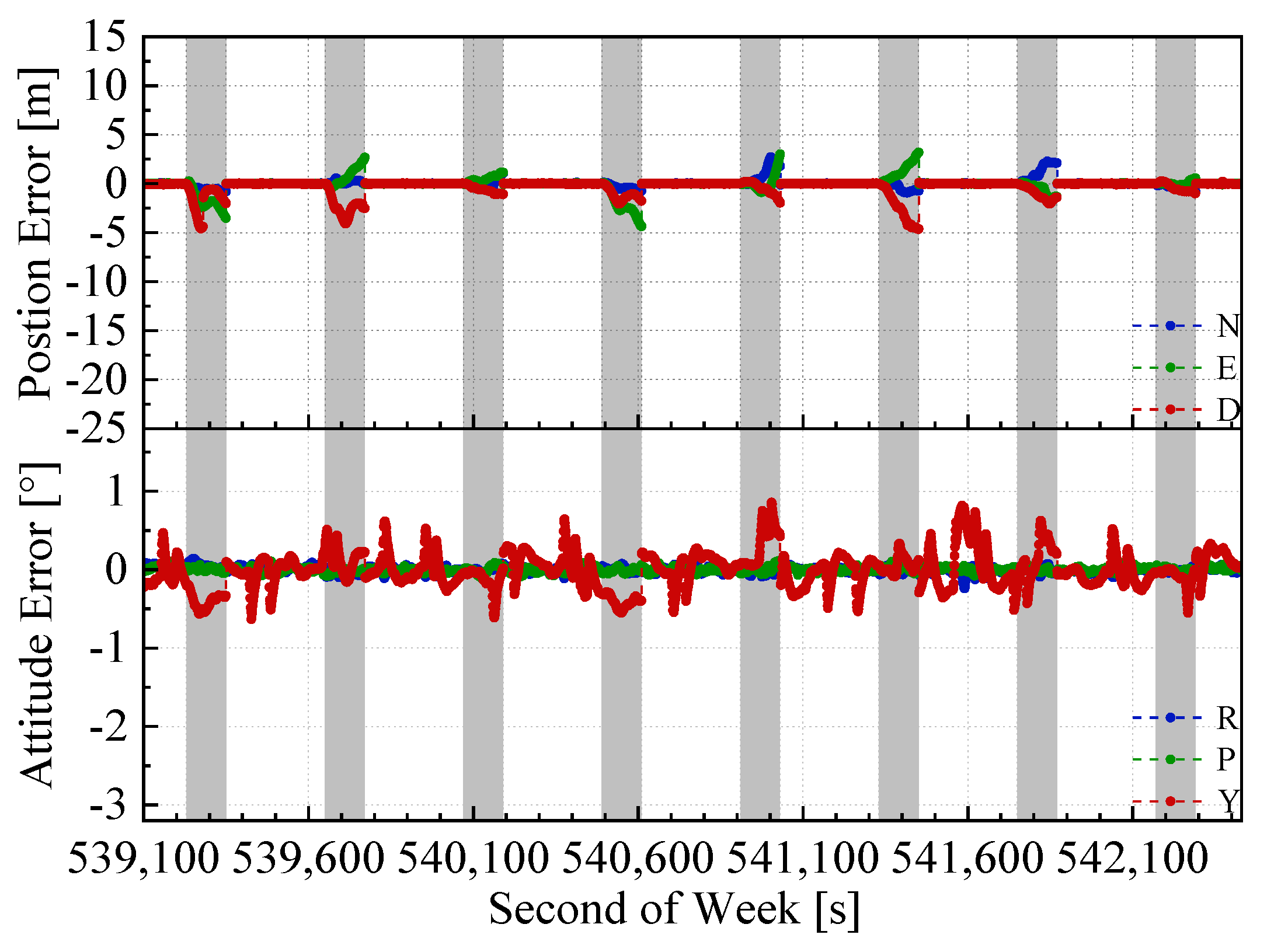
Sensors Free Full Text Gnss Imu Odo Lidar Slam Integrated Navigation System Using Imu Odo Pre Integration Html
Open Source Archivi Luigi Freda

Pdf Comparison Of Ros Based Visual Slam Methods In Homogeneous Indoor Environment



