Lidar Slam Matlab
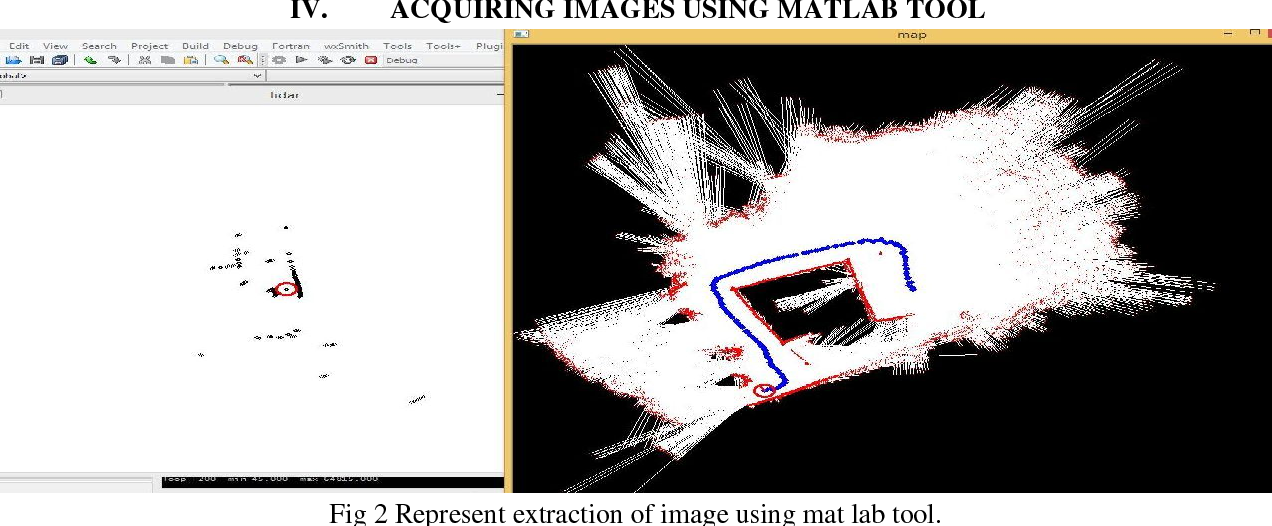
Figure 2 From Slam Using Lidar For Ugv Semantic Scholar
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Aerial Lidar Slam Using Fpfh Descriptors Matlab Simulink

Ekf Slam Using Lidar Sensor And Corner Extraction File Exchange Matlab Central

How To Place A Colorbar In Matlab Plot Legend Icon Stack Overflow
Slam Algorithms Github Topics Github
Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM.

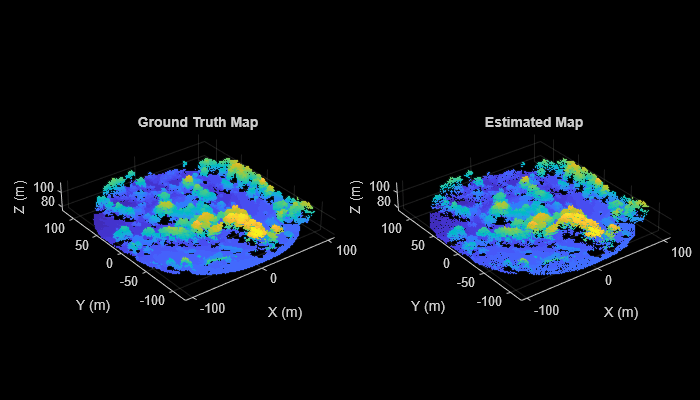
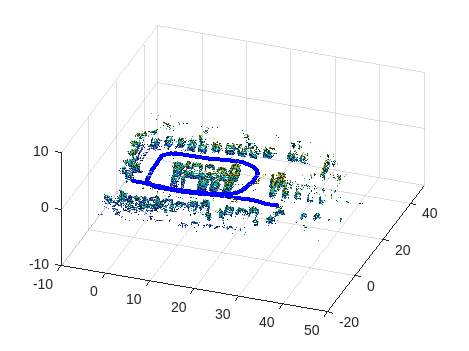
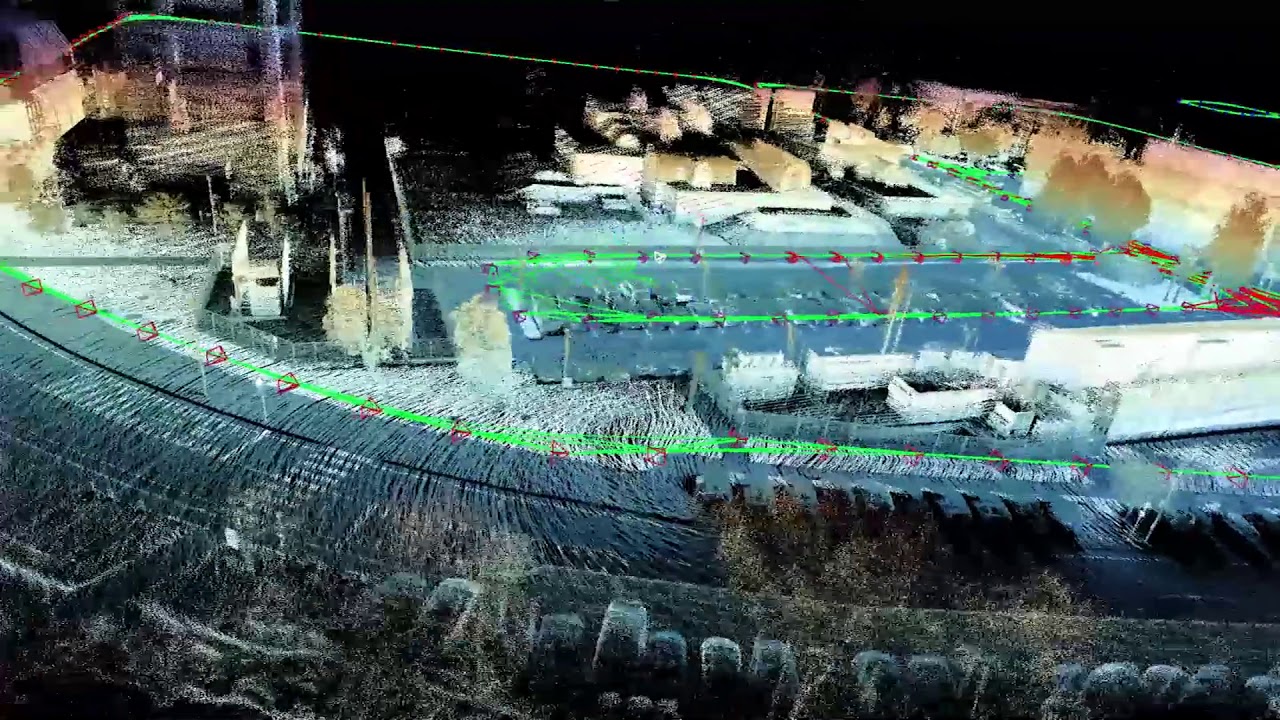
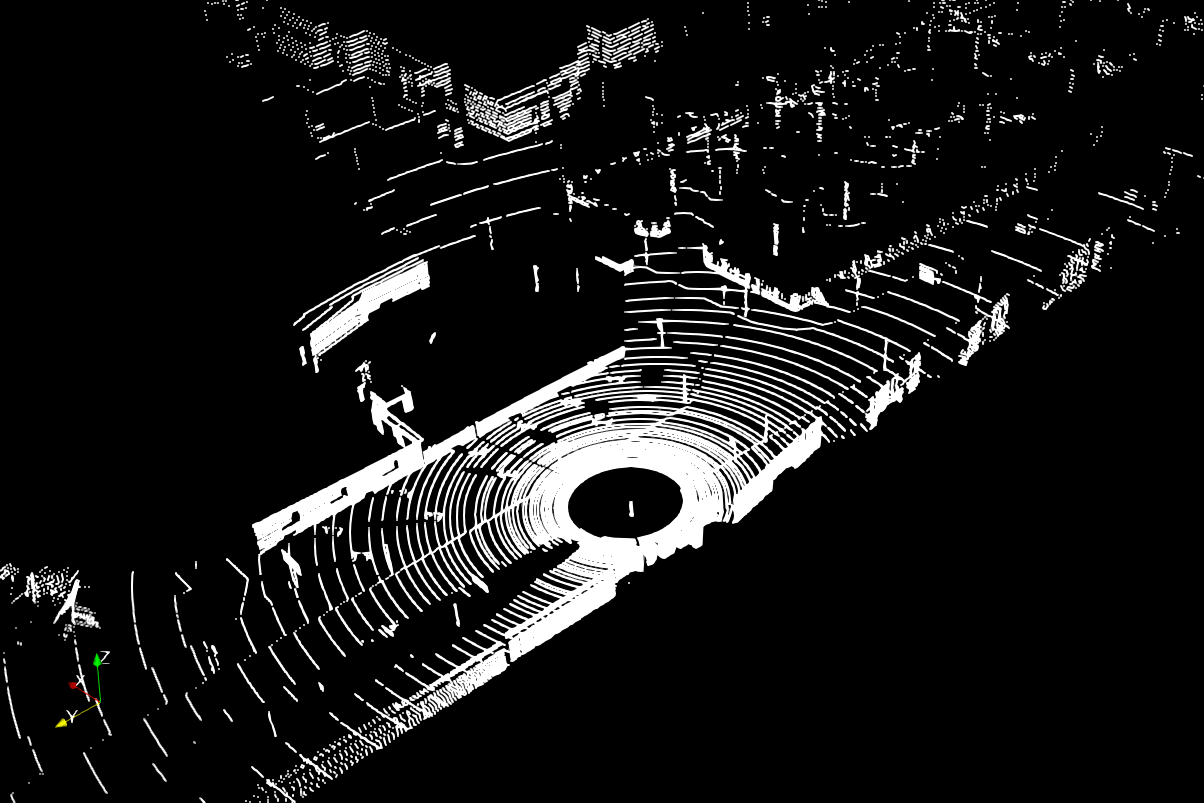
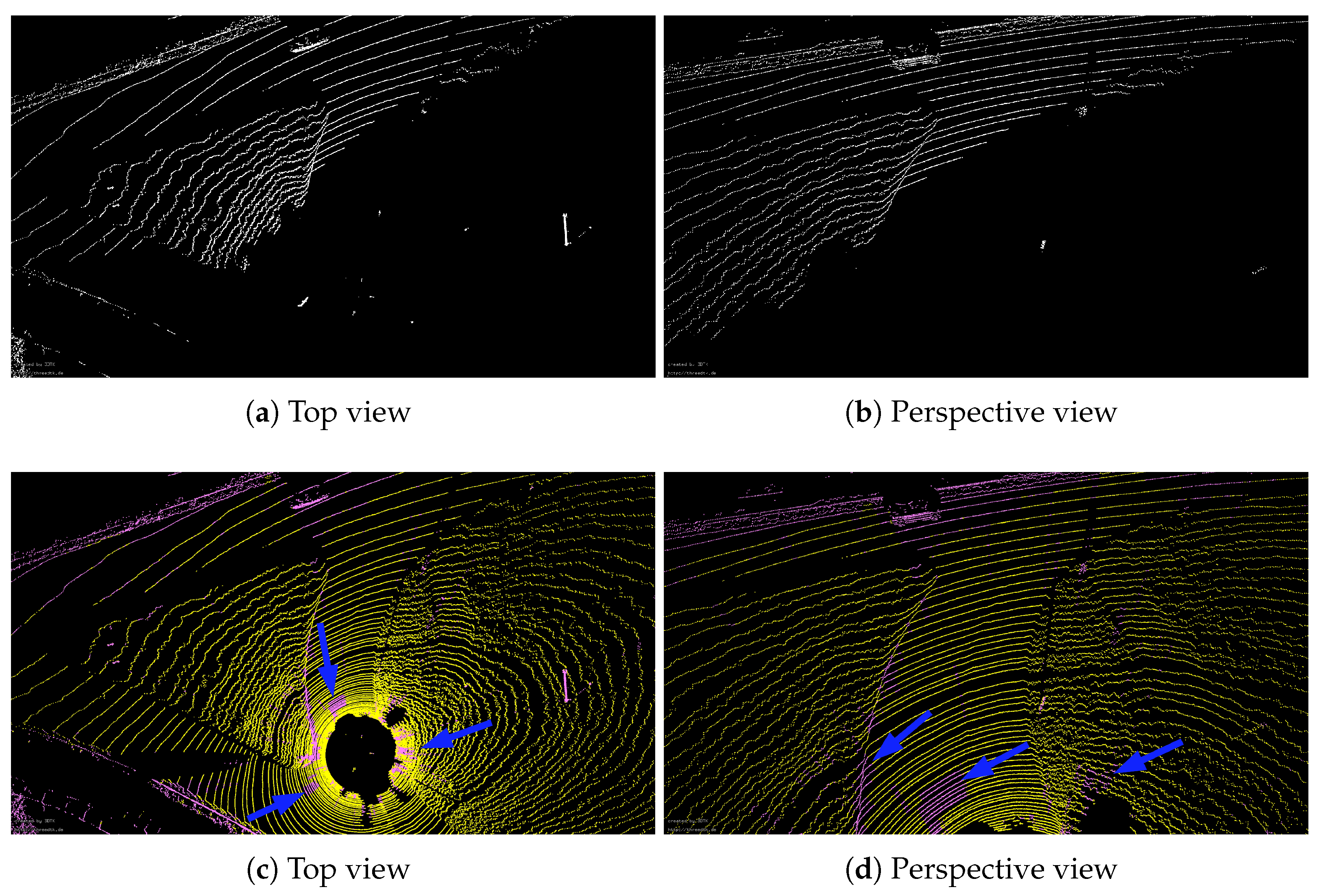
Lidar slam matlab. View MATLAB Command This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on collected 3D lidar sensor data using point cloud processing algorithms and pose graph optimization. AddScan(slamObj,currScan) adds a lidar scan, currScan, to the lidar SLAM object, slamObjThe function uses scan matching to correlate this scan to the most recent one, then adds it to the pose graph defined in slamObjIf the scan is accepted, addScan detects loop closures and optimizes based on settings in slamObj. Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM.
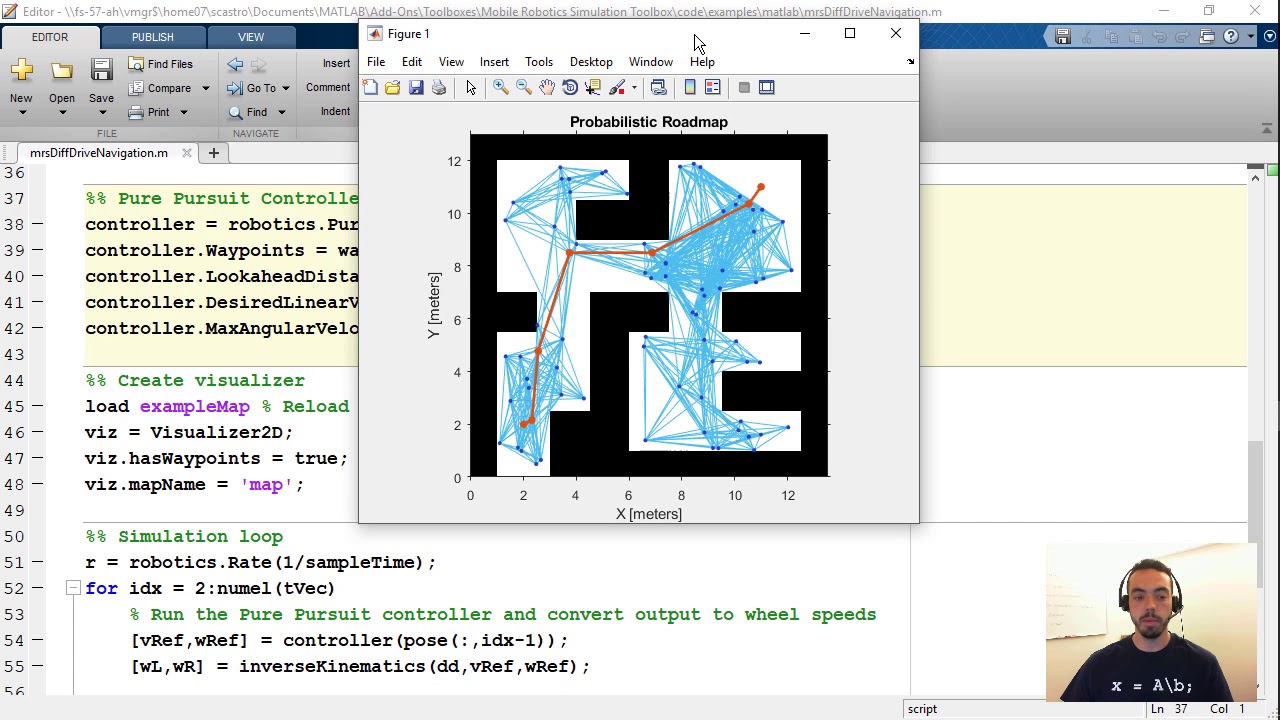
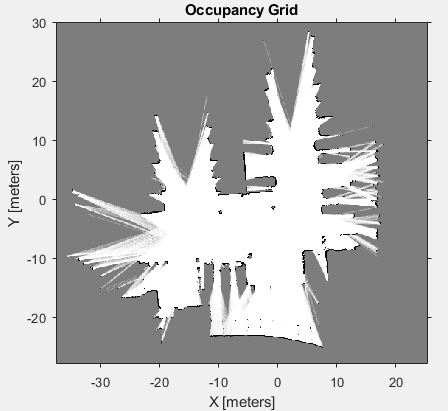
LOAM Lidar Odometry and Mapping in Realtime), which uses Eigen and Ceres Solver to simplify code structure This code is modified from LOAM and LOAM_NOTED This code is clean and simple without complicated mathematical derivation and redundant operations It is a good learning material for SLAM beginners Modifier Tong Qin, Shaozu Cao 1. 2D Lidar SLAM Implement Simultaneous Localization and Mapping (SLAM) algorithms from 2D lidar scans Estimate positions and create binary or probabilistic occupancy grids using real or simulated sensor readings. Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB.
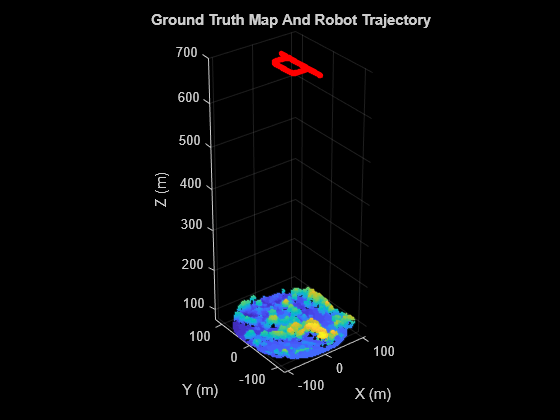
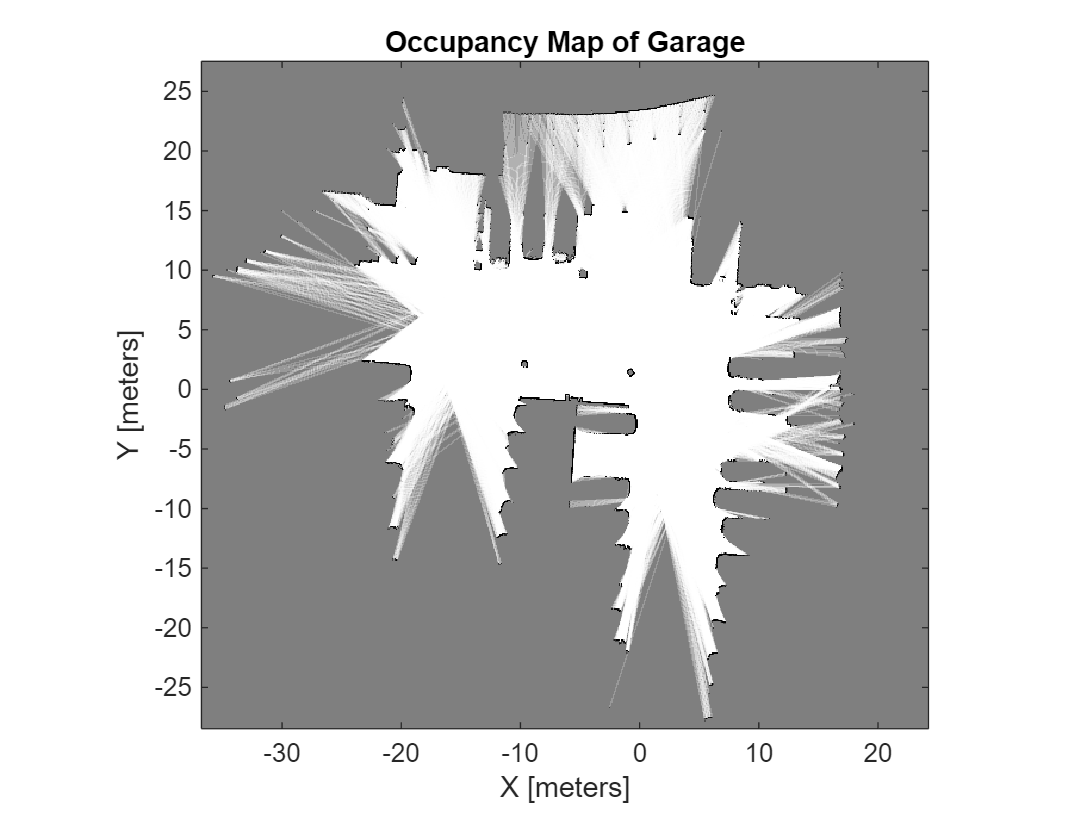
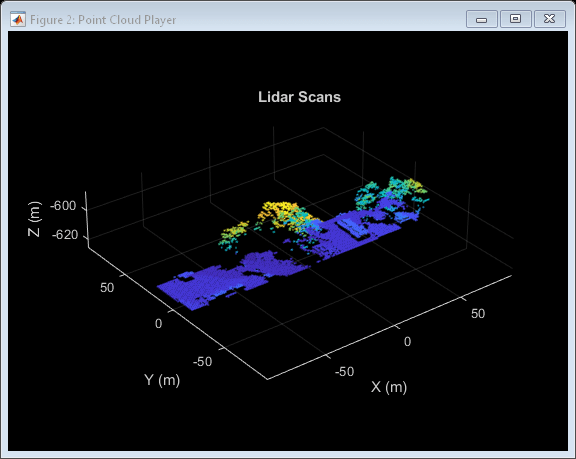
Load Data And Set Up Tunable Parameters Load the 3D lidar data collected from a Clearpath™ Husky robot in a parking garage The lidar data contains a cell array of nby3 matrices, where n is the number 3D points in the captured lidar data, and 3 columns represent xyzcoordinates associated with each captured point. Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM. Build a Map from Lidar Data Using SLAM Process lidar data to build a map and estimate a vehicle trajectory using simultaneous localization and mapping Open Script Lidar Localization with Unreal Engine Simulation You clicked a link that corresponds to this MATLAB command.
Design LidarBased SLAM Using Unreal Engine Simulation Environment. AddScan(slamObj,currScan) adds a lidar scan, currScan, to the lidar SLAM object, slamObjThe function uses scan matching to correlate this scan to the most recent one, then adds it to the pose graph defined in slamObjIf the scan is accepted, addScan detects loop closures and optimizes based on settings in slamObj. Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM.
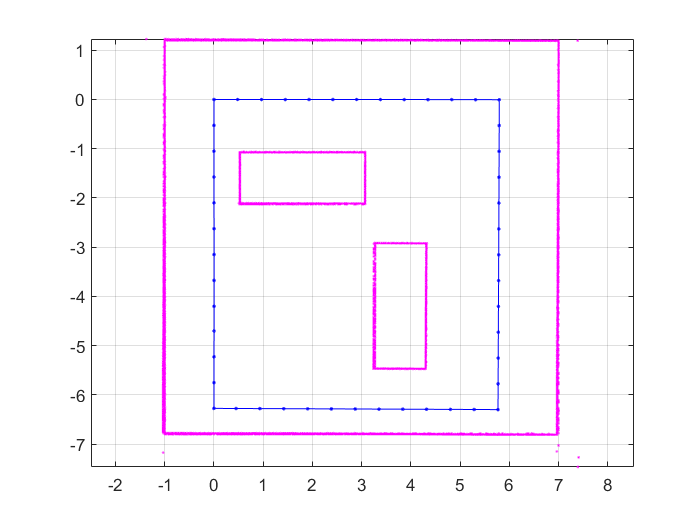
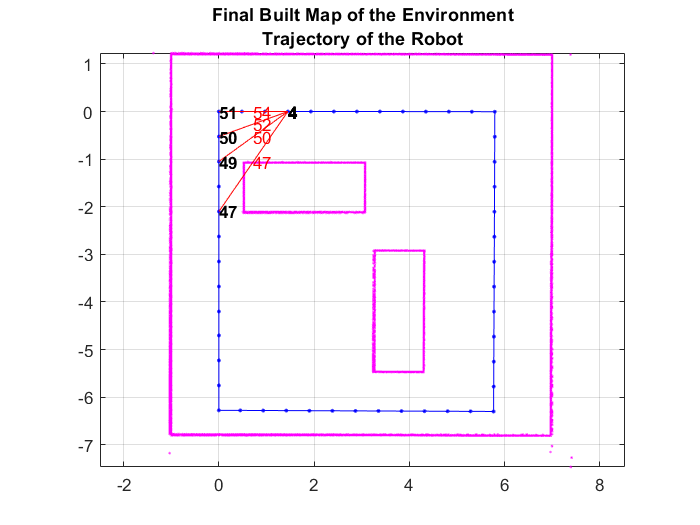
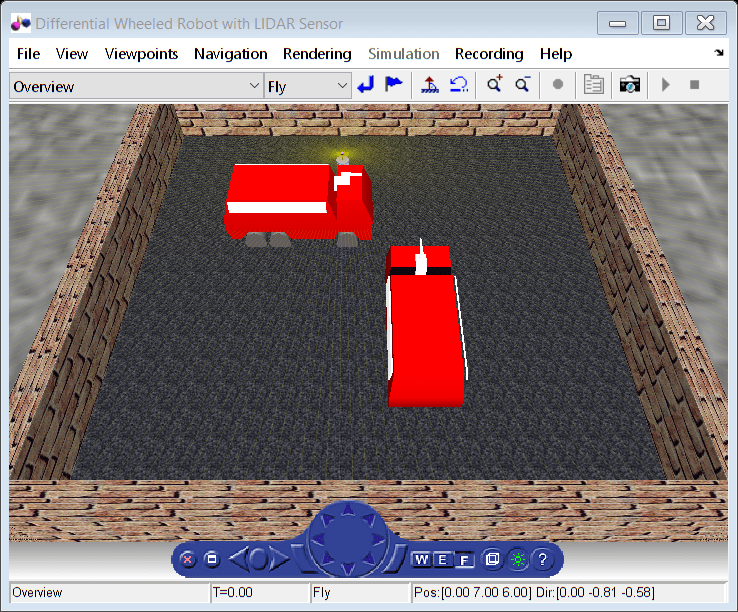
Create Lidar Slam Object Create a lidarSLAM object and set the map resolution and the max lidar range This example uses a simulated virtual environment The robot in this vrworld has a lidar sensor with range of 0 to 10 meters Set the max lidar range (8m) smaller than the max scan range, as the laser readings are less accurate near max range. The trajectory of the robot is a collection of its poses which consists of its location and orientation in 3D space Estimate a robot pose from a 3D lidar scan instance using the 3D lidar SLAM algorithm Use these processes to perform 3D SLAM estimation. The lidarSLAM class performs simultaneous localization and mapping (SLAM) for lidar scan sensor inputs.
Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB. This example shows how to process 3D lidar data from a sensor mounted on a vehicle to progressively build a map and estimate the trajectory of a vehicle using simultaneous localization and mapping (SLAM) In addition to 3D lidar data, an inertial navigation sensor (INS) is also used to help build the map. Dismiss Join GitHub today GitHub is home to over 50 million developers working together to host and review code, manage projects, and build software together.
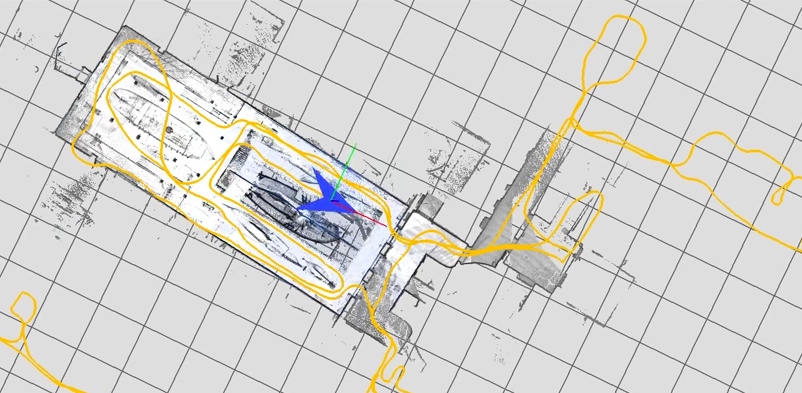
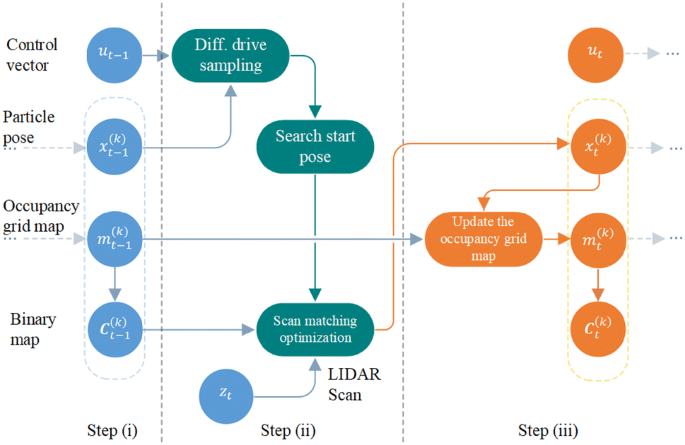
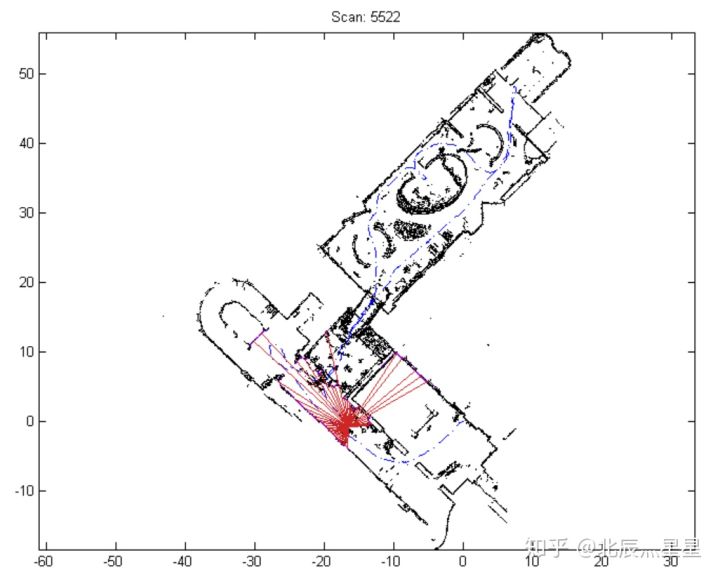
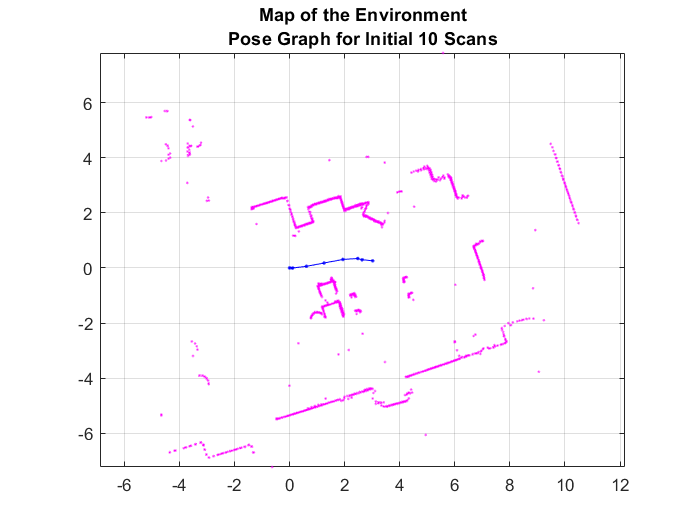
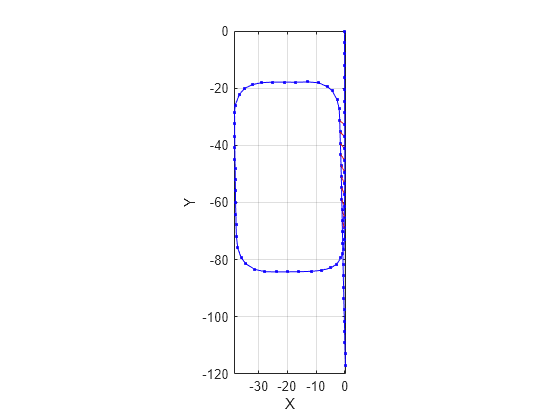
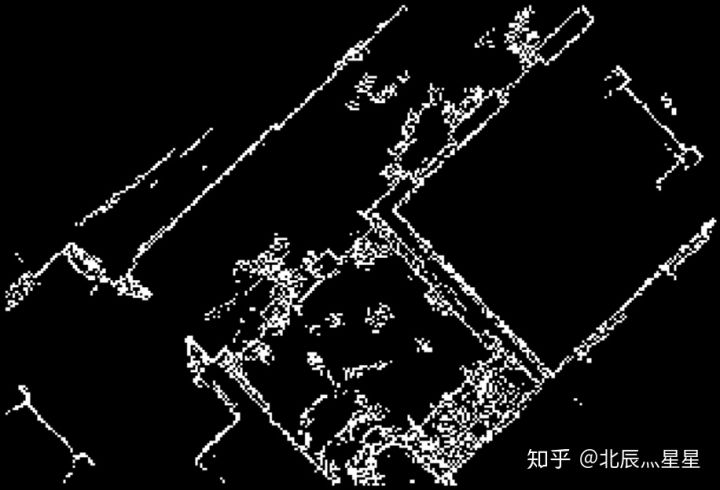
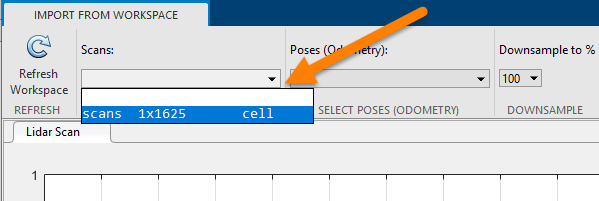
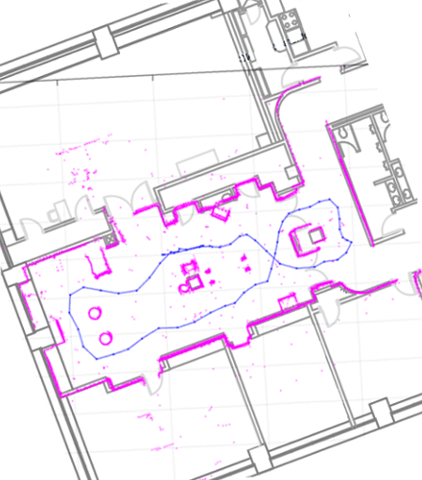
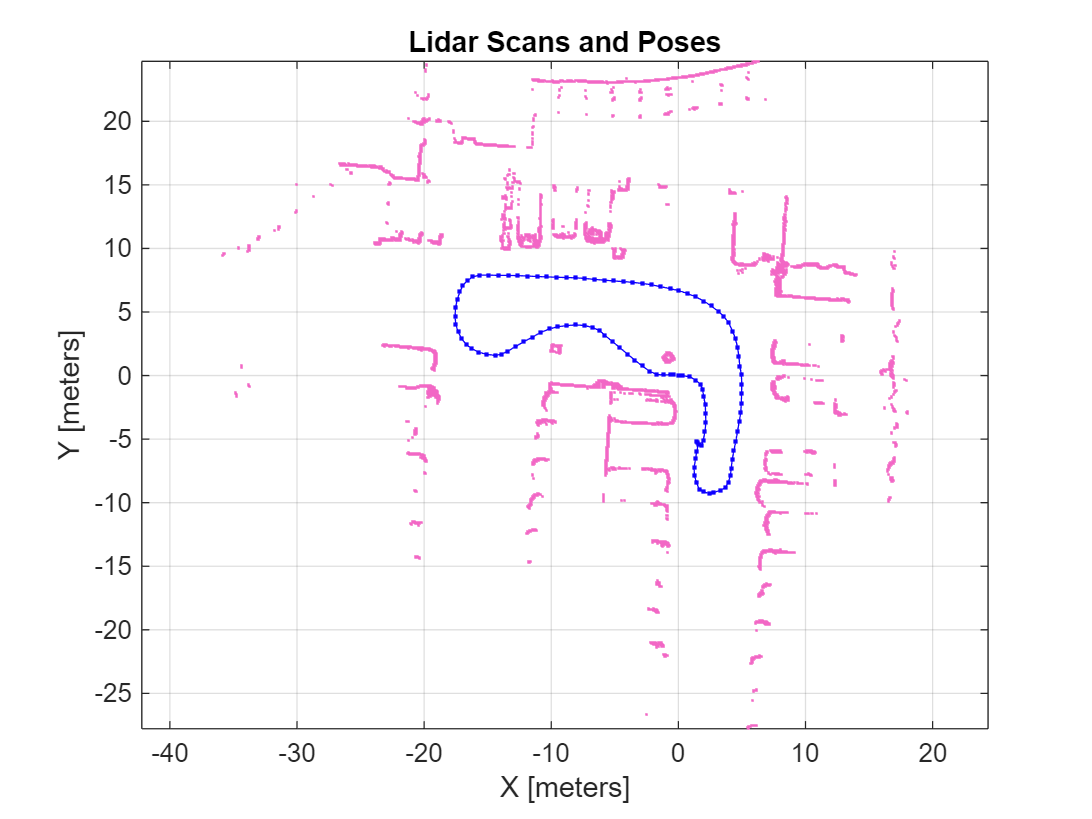
0 Introduction You have just started learning SLAM for nearly a month, but you don't know much about the theoretical derivation So you have developed a simple demo of 2D LiDAR SLAM on matlab to understand the complete process of SLAM (1) Data source 2D laser SLAM data from Deutsches Museum, UTF8. Load Data and Set Up SLAM Algorithm Load a cell array of lidarScan objects The lidar scans were collected in a parking garage on a Husky® robot from ClearPath Robotics® Typically, lidar scans are taken at a high frequency and each scan is not needed for SLAM Therefore, down sample the scans by selecting only every 40th scan. The lidarSLAM class performs simultaneous localization and mapping (SLAM) for lidar scan sensor inputs.
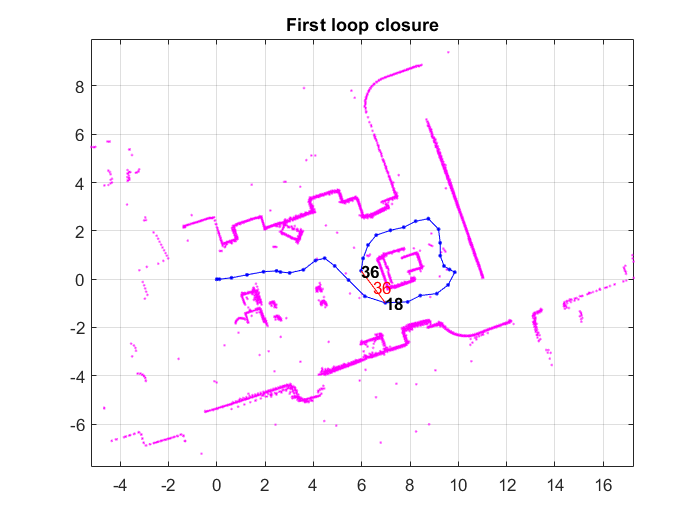
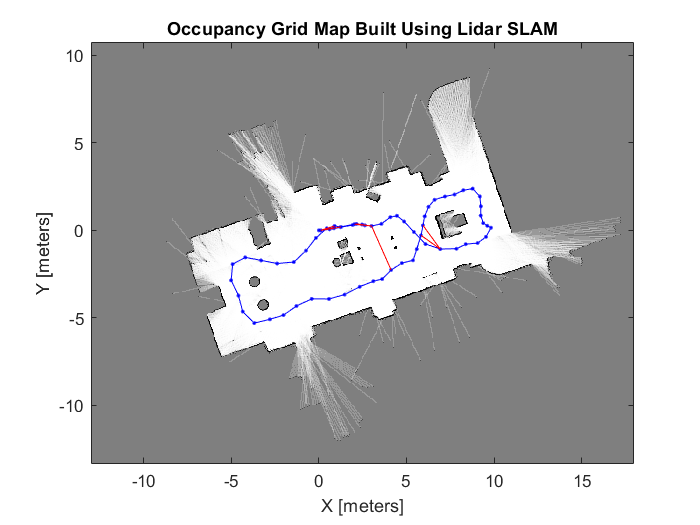
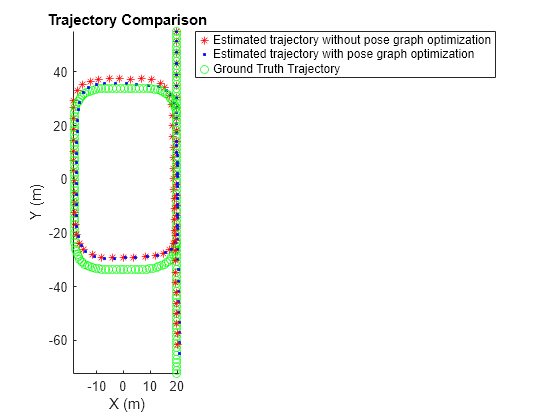
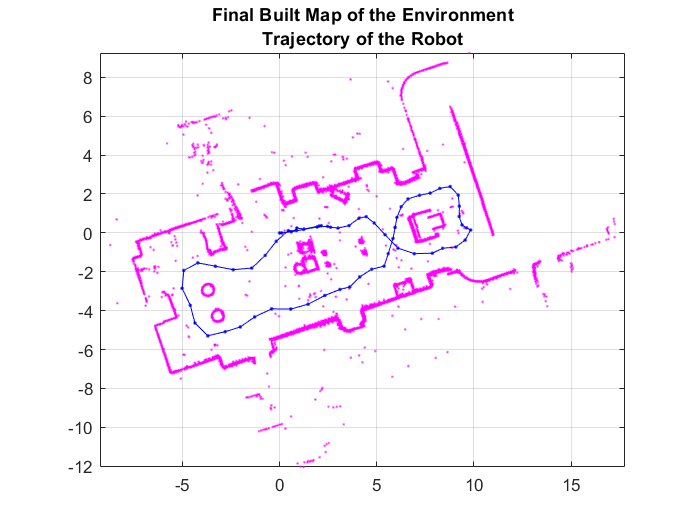
Lidar SLAM object, specified as a lidarSLAM object The object contains the SLAM algorithm parameters, sensor data, and underlying pose graph used to build the map Output Arguments collapse all newSlamObj — Lidar Run the command by entering it in the MATLAB Command Window. AddScan(slamObj,currScan) adds a lidar scan, currScan, to the lidar SLAM object, slamObjThe function uses scan matching to correlate this scan to the most recent one, then adds it to the pose graph defined in slamObjIf the scan is accepted, addScan detects loop closures and optimizes based on settings in slamObj. This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot.
Simultaneous localization and mapping (SLAM) is a general concept for algorithms correlating different sensor readings to build a map of a vehicle environment and track pose estimates Different algorithms use different types of sensors and methods for correlating data The lidarSLAM algorithm uses lidar scans and odometry information as sensor inputs. Dismiss Join GitHub today GitHub is home to over 50 million developers working together to host and review code, manage projects, and build software together. Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM.
'Build a Map from Lidar Data Using SLAM' Learn more about computer vision toolbox, slam, lidar, navigation, example Computer Vision Toolbox, Automated Driving Toolbox. Simultaneous localization and mapping (SLAM) is a general concept for algorithms correlating different sensor readings to build a map of a vehicle environment and track pose estimates Different algorithms use different types of sensors and methods for correlating data The lidarSLAM algorithm uses lidar scans and odometry information as sensor inputs. Lidar SLAM object, specified as a lidarSLAM object The object contains the SLAM algorithm parameters, sensor data, and underlying pose graph used to build the map nodeIDs — Node IDs from pose graph positive Run the command by entering it in the MATLAB Command Window.
View MATLAB Command This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot. Simultaneous localization and mapping (SLAM) is a general concept for algorithms correlating different sensor readings to build a map of a vehicle environment and track pose estimates Different algorithms use different types of sensors and methods for correlating data The lidarSLAM algorithm uses lidar scans and odometry information as sensor inputs. Load Data And Set Up Tunable Parameters Load the 3D lidar data collected from a Clearpath™ Husky robot in a parking garage The lidar data contains a cell array of nby3 matrices, where n is the number 3D points in the captured lidar data, and 3 columns represent xyzcoordinates associated with each captured point.
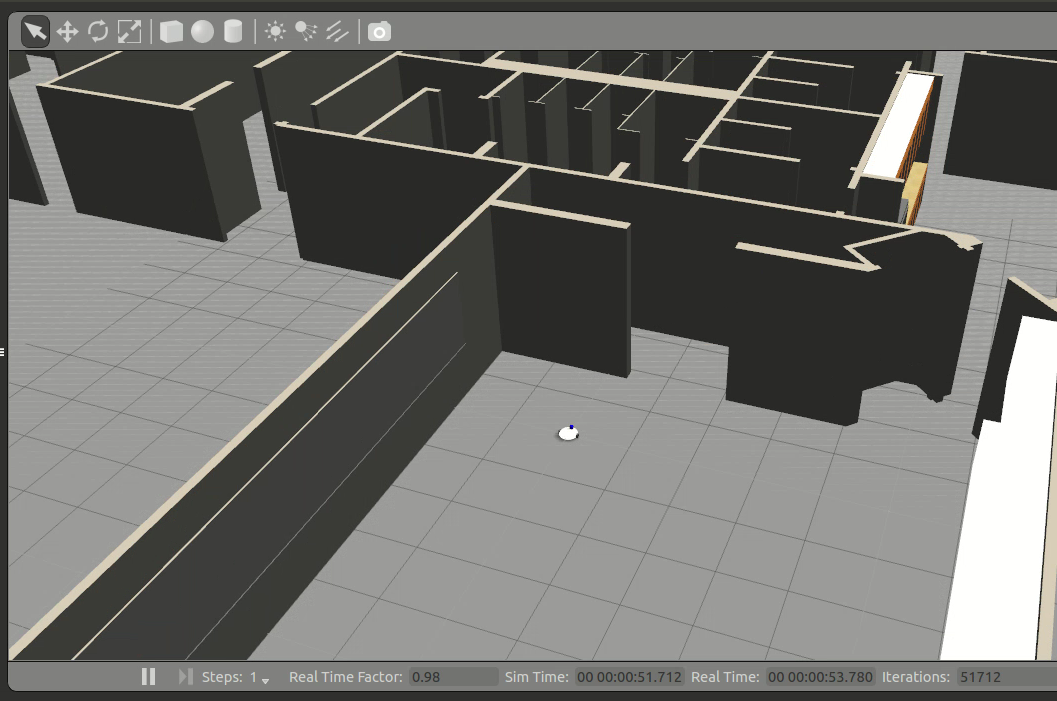
The frontend data collection of SLAM is of two types Visual SLAM and LiDAR SLAM Visual SLAM (vSLAM) uses camera to acquire or collect imagery of the surrounding Visual SLAM can use simple cameras (360 degree panoramic, wide angle and fisheye camera), compound eye cameras (stereo and multi cameras), and RGBD cameras (depth and ToF cameras). Use a pcplayer (Computer Vision Toolbox) object in a MATLAB Function block For an example of this visualization setup, see Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment Use the Bird'sEye Scope For more details, see Visualize Sensor Data from Unreal Engine Simulation Environment. Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB.
Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB. This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot. Test Matlab 2D Lidar SLAM algorithm on simulator data GPL30 License 1 star 0 forks Star Watch Code;.
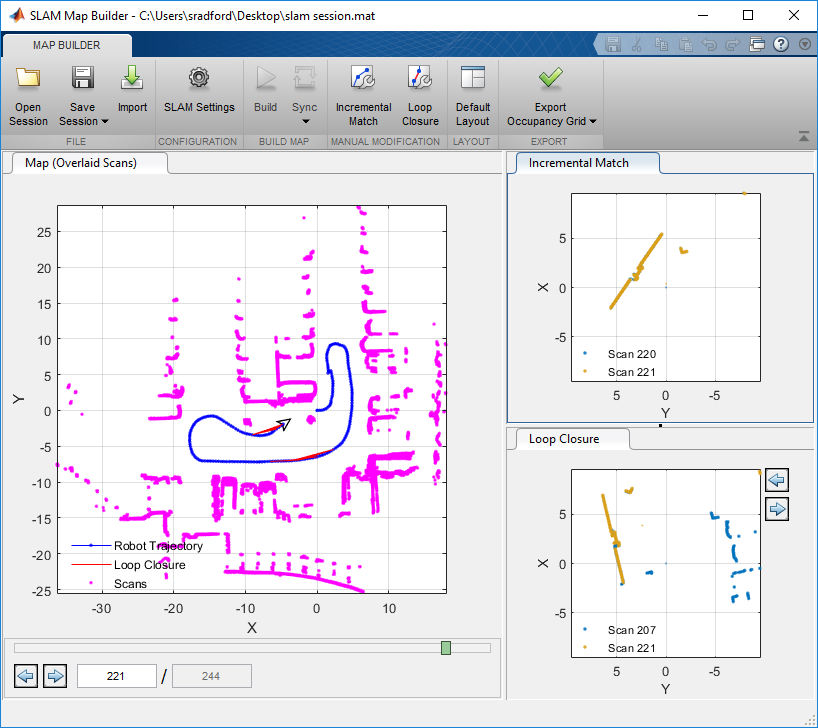
Load Data and Set Up SLAM Algorithm Load a cell array of lidarScan objects The lidar scans were collected in a parking garage on a Husky® robot from ClearPath Robotics® Typically, lidar scans are taken at a high frequency and each scan is not needed for SLAM Therefore, down sample the scans by selecting only every 40th scan. SLAM using 2D lidar Contribute to meyiao/LaserSLAM development by creating an account on GitHub. The lidarSLAMclass performs simultaneous localization and mapping (SLAM) for lidar scan sensor inputs The SLAM algorithm takes in lidar scans and attaches them to a node in an underlying pose graph The algorithm then correlates the scans using scan matching It also searches for loop closures, where scans overlap.
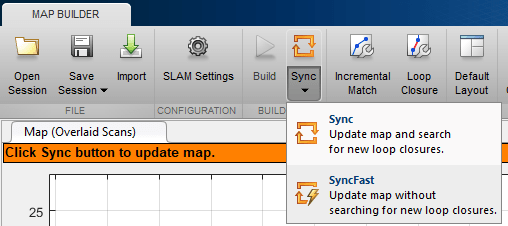
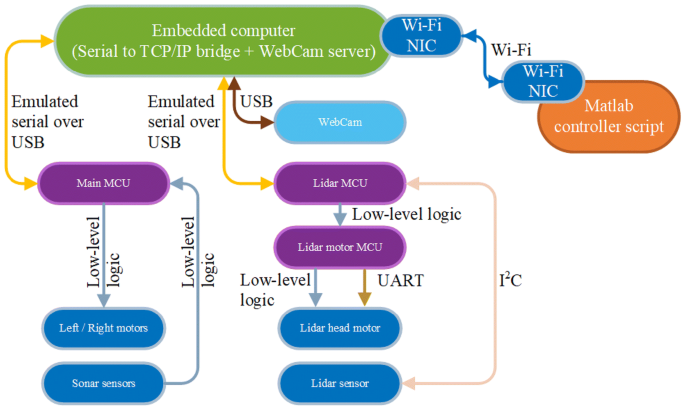
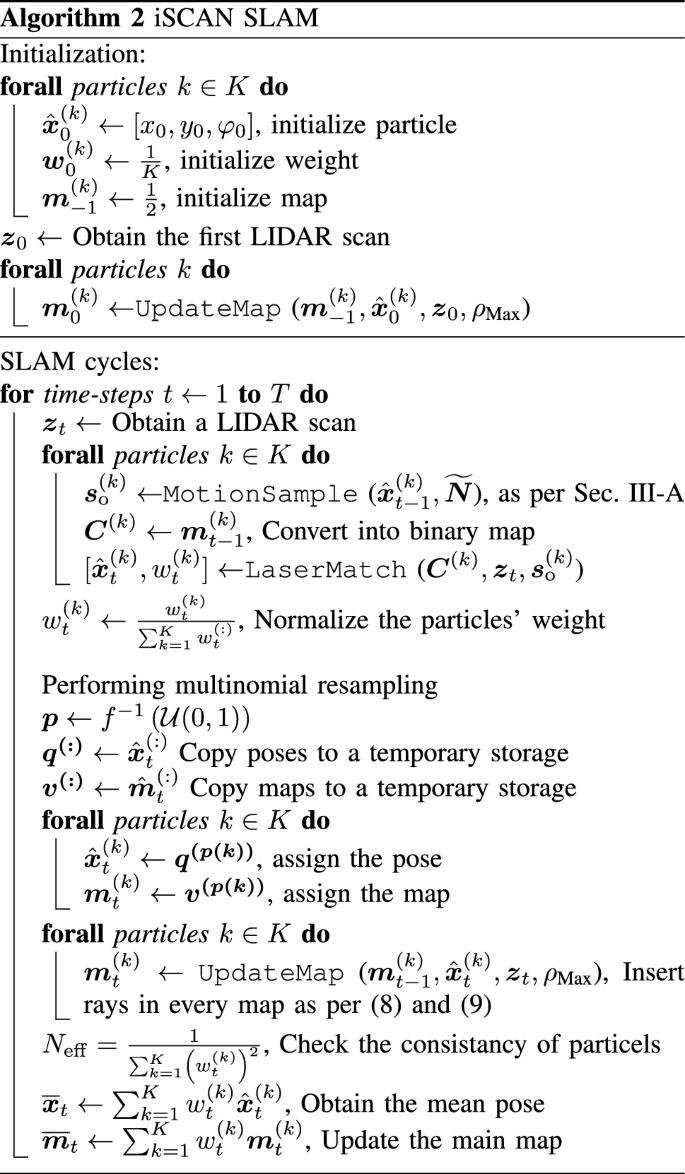
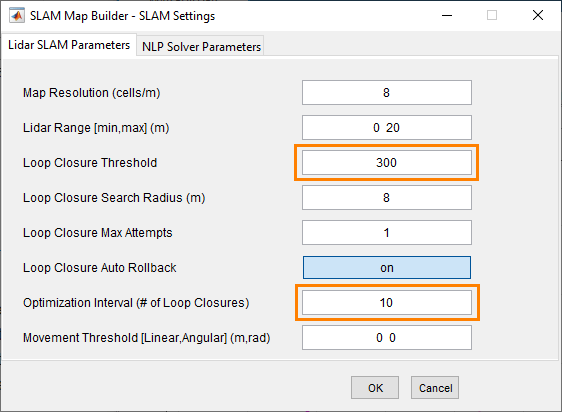
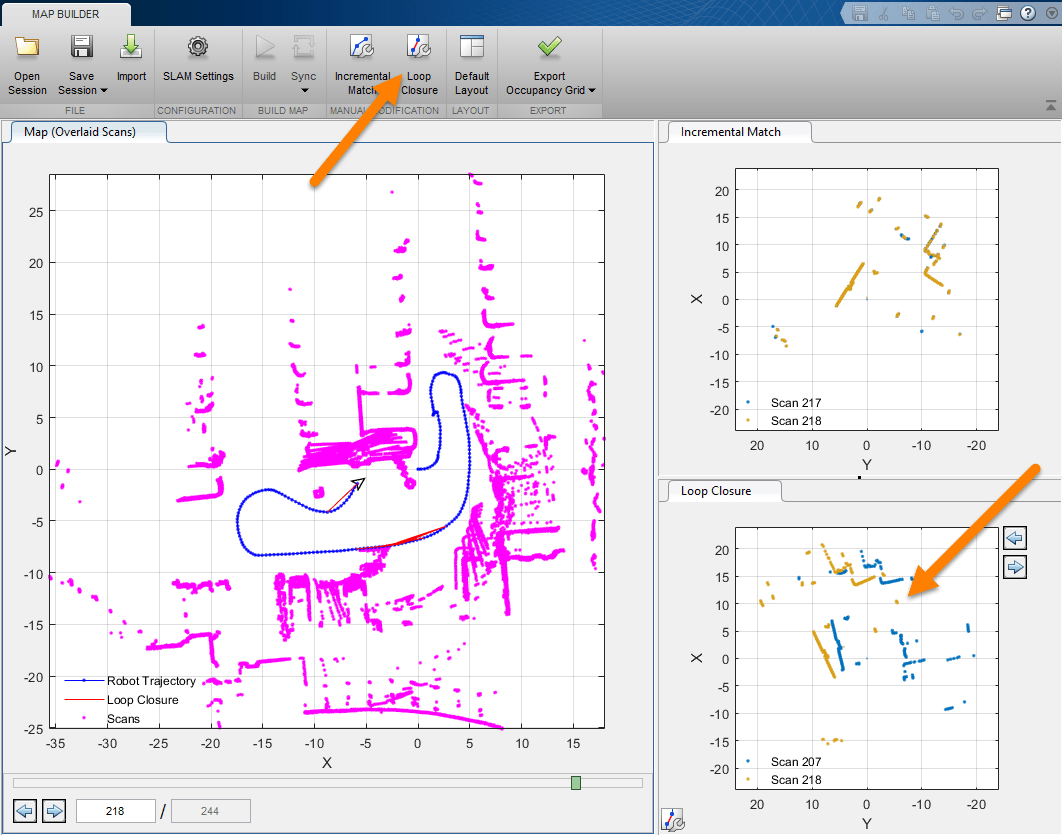
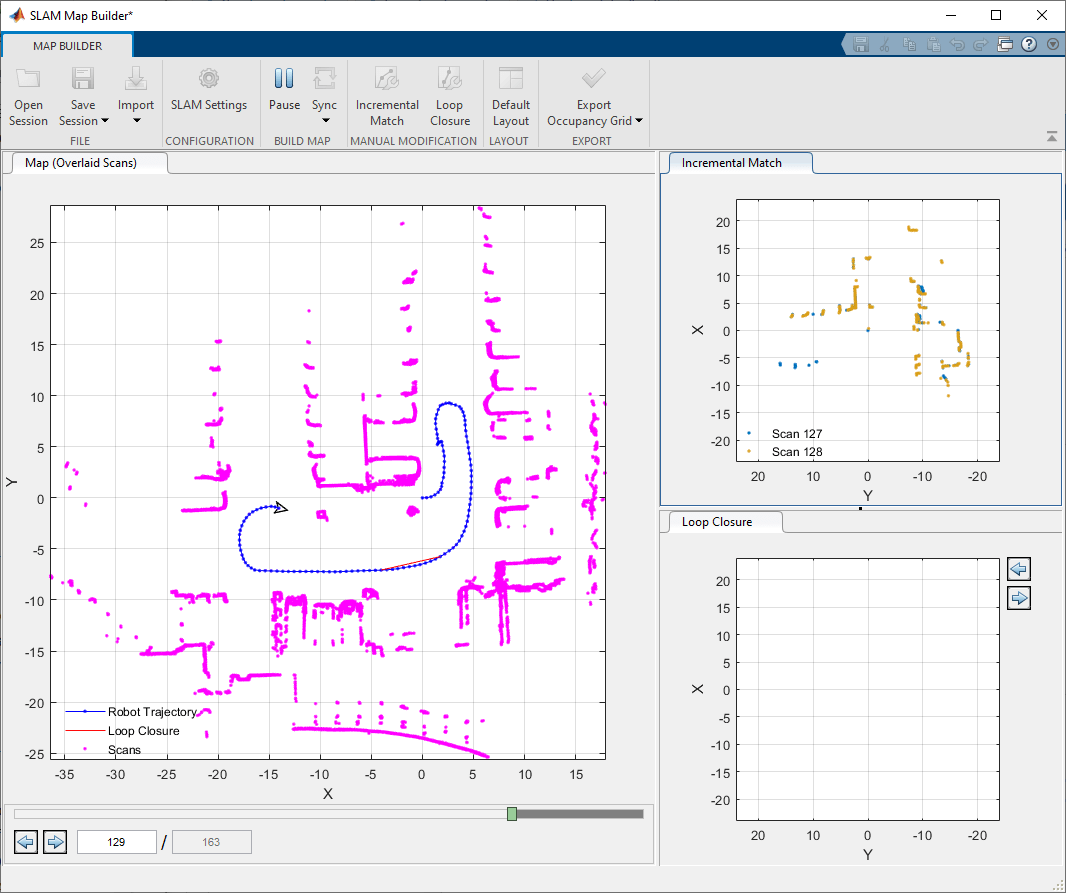
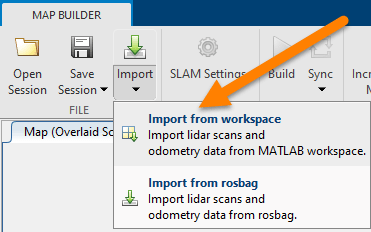
Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map. SLAM Robot which uses the latest technology like ROS (Robotic Operating System) with Raspberry Pi and also interfaced with RPLidar a 360degree Lidar, which sends those Laser scan value to the Matlab to map the environment Features SLAM Simultaneous Localisation and Mapping Shipping 4 to 8 working days from the date of purchase Package Includes Complete Hardware Kit Demo VideoEmbedded.
A lidar sensor is attached to the vehicle using the Simulation 3D Lidar block In the block dialog box, use the Mounting tab to adjust the placement of the sensor Use the Parameters tab to configure properties of the sensor to simulate different lidar sensors In this example, the lidar is mounted on the center of the roof. Simultaneous localization and mapping (SLAM) uses both Mapping and Localization and Pose Estimation algorithms to build a map and localize your vehicle in that map at the same time Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM. This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on lidar scans obtained from simulated environment using pose graph optimization.
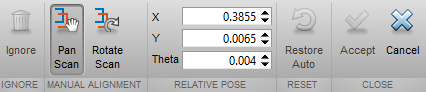
BreezySLAM This repository contains everything you need to start working with Lidarbased SLAM in Python (There is also support for Matlab, C, and Java;. Use lidarSLAM to tune your own SLAM algorithm that processes lidar scans and odometry pose estimates to iteratively build a map Use buildMap to take logged and filtered data to create a map using SLAM The SLAM Map Builder app lets you manually modify relative poses and align scans to improve the accuracy of your map. Test Matlab 2D Lidar SLAM algorithm on simulator data GPL30 License 1 star 0 forks Star Watch Code;.
However, because of the popularity of Python for this kind of work, I am no longer updating the code for those languages). The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map. View MATLAB Command This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on collected 3D lidar sensor data using point cloud processing algorithms and pose graph optimization.
The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map. This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on lidar scans obtained from simulated environment using pose graph optimization. AddScan(slamObj,currScan) adds a lidar scan, currScan, to the lidar SLAM object, slamObjThe function uses scan matching to correlate this scan to the most recent one, then adds it to the pose graph defined in slamObjIf the scan is accepted, addScan detects loop closures and optimizes based on settings in slamObj.
Lidar Toolbox™ proporciona algoritmos, funciones y apps para diseñar, analizar y probar sistemas de procesamiento de LiDAR Puede realizar tareas de seguimiento y detección de objetos, segmentación semántica, ajuste de formas, registro de LiDAR y detección de obstáculos. Design LidarBased SLAM Using Unreal Engine Simulation Environment.
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Mapperbot Iscan Open Source Integrated Robotic Platform And Algorithm For 2d Mapping Springerlink
Google Releases Lidar Slam Algorithms Teases Innovative Mapping Solution Spar 3d
Feature Article Products Related To Slam Technology Visual Slam Lidar Slam Tegakari An Information Transmission Media For Research And Development

I Developed A 2d Lidar Slam Using Matlab
Q Tbn And9gcqi3mfw4hgk6r8w1lffbbbyjkbsiomlfnbcrs1eweyobuaewvk8 Usqp Cau
Utm Arc Nasa Gov Docs 17 Hening Scitech 17 0448 Pdf
Implement Online Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Mapperbot Iscan Open Source Integrated Robotic Platform And Algorithm For 2d Mapping Springerlink
Q Tbn And9gcsxuh640xu6m9i8ellxgechhhxgnp2g1zspsktjvkxxo75 K0nm Usqp Cau

Build A Map From Lidar Data Using Slam Matlab Simulink

Lidar Camera Calibration With Matlab Youtube

Implement Simultaneous Localization And Mapping Slam With File Exchange Matlab Central
Aerial Lidar Slam Using Fpfh Descriptors Matlab Simulink
I Developed A 2d Lidar Slam Using Matlab

Mapping Forests Using An Unmanned Ground Vehicle With 3d Lidar And Graph Slam Sciencedirect
Perform Slam Using 3 D Lidar Point Clouds Matlab Simulink
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Mapperbot Iscan Open Source Integrated Robotic Platform And Algorithm For 2d Mapping Springerlink

Tkj Electronics Handheld Xv 11 Lidar With Stm32f429 And Matlab

Jacobi Method To Solve Equation Using Matlab Mfile Matlab Programming
Www Matlabexpo Com Content Dam Mathworks Mathworks Dot Com Images Events Matlabexpo Us 18 Autonomous Navigation Using Model Based Design Pdf
Autonomous Driving Org Wp Content Uploads 18 08 Mathworks Autonomousdrivingmeetuppresentation Pdf

Lidar Projects Pantech Blog

Build A Map From Lidar Data Using Slam Matlab Simulink
Slam Robot Using Ros Lidar With Raspberry Pi Youtube

Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Aerial Lidar Slam Using Fpfh Descriptors Matlab Simulink
Perform Localization And Mapping Using Lidar Scans Matlab
Slam Github Topics Github

Design Lidar Slam Algorithm Using Unreal Engine Simulation Environment Matlab Simulink

What Is Slam Simultaneous Localization And Mapping Matlab Simulink Matlab Simulink
Utm Arc Nasa Gov Docs 17 Hening Scitech 17 0448 Pdf
Build 2 D Grid Maps Using Lidar Based Slam Matlab
What S New In Matlab And Simulink Segment And Register Lidar Point Clouds Lidar Based Slam
Building A Map Using Slam Mastering Ros For Robotics Programming Second Edition
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Breezyslam By Simondlevy
Asmedigitalcollection Asme Org Omae Proceedings Pdf Omae17 V006t05a029 V006t05a029 Omae17 610 Pdf
Aerial Lidar Slam Using Fpfh Descriptors Matlab Simulink

Pca Based Line Detection From Range Data For Mapping And Localization Aiding Of Uavs
Slam Matlab Simulink
Implement Online Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Lidar Slam For Automated Driving Youtube
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink Mathworks Italia
Slam Robot

What Is Slam Simultaneous Localization And Mapping Matlab Simulink Matlab Simulink
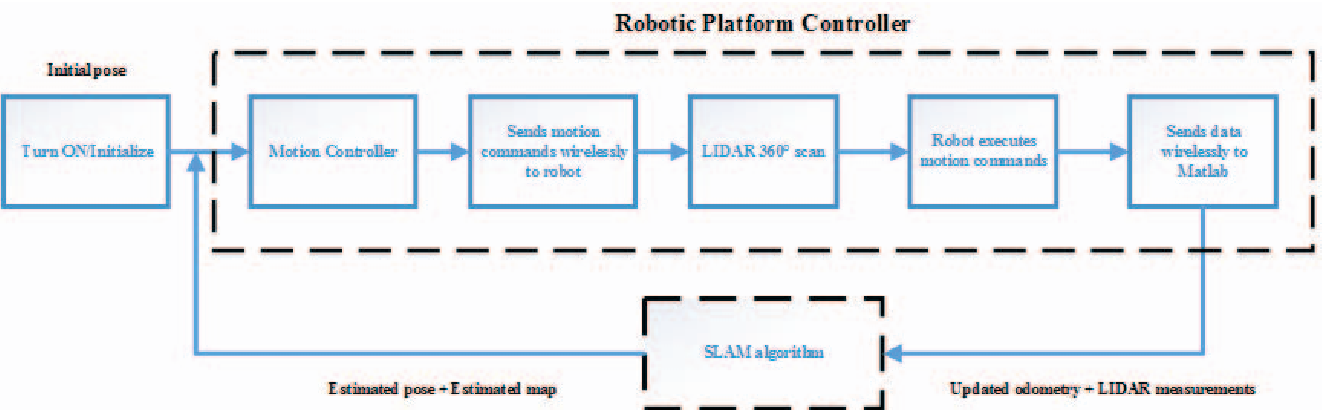
Figure 5 From Rfs Slam Robot An Experimental Platform For Rfs Based Occupancy Grid Slam Semantic Scholar

Matlab Slam Youtube

Tkj Electronics Handheld Xv 11 Lidar With Stm32f429 And Matlab

What Is Slam Simultaneous Localization And Mapping Matlab Simulink Matlab Simulink
Implement Online Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

The Sick Lidar Matlab C Toolbox
Www Matlabexpo Com Content Dam Mathworks Mathworks Dot Com Images Events Matlabexpo Online Matlab Expo Sensor Fusion And Navigation For Autonomous Systems Using Matlab And Simulink Pdf
Real Time Odometry Less 3d Lidar Slam With Generalized Icp And Pose Graph Optimization Long Ver Youtube
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Implement Simultaneous Localization And Mapping Slam With Matlab Youtube

Velodyne Lidar Vlp 16 Slam Indoor Up Downhill On Matlab Only Use 3d Lidar Youtube
Http Www Diva Portal Org Smash Get Diva2 Fulltext01 Pdf
Simulating Mobile Robots With Matlab And Simulink Youtube
I Developed A 2d Lidar Slam Using Matlab
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Asrl Datasets
Http Www Diva Portal Org Smash Get Diva2 Fulltext01 Pdf
Www Matlabexpo Com Content Dam Mathworks Mathworks Dot Com Images Events Matlabexpo Us 18 Autonomous Navigation Using Model Based Design Pdf
Build 2 D Grid Maps Using Lidar Based Slam Matlab

Pdf Autonomous 2d Slam And 3d Mapping Of An Environment Using A Single 2d Lidar And Ros

Simultaneous Localization And Mapping Wikiwand
Q Tbn And9gcriqht1o5lsp2bfzgl7znw Mnrb8f6y0 4z1t9eeqriun2ayh6h Usqp Cau
I Developed A 2d Lidar Slam Using Matlab
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

What Is Slam Simultaneous Localization And Mapping Matlab Simulink Matlab Simulink
Sensors Free Full Text Integrate Point Cloud Segmentation With 3d Lidar Scan Matching For Mobile Robot Localization And Mapping Html
Aerial Lidar Slam Using Fpfh Descriptors Matlab Simulink
Zdefuxz6iqus M
Perform Localization And Mapping Using Lidar Scans Matlab

Design Lidar Slam Algorithm Using Unreal Engine Simulation Environment Matlab Simulink

Design Lidar Slam Algorithm Using Unreal Engine Simulation Environment Matlab Simulink Mathworks United Kingdom
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Www Matlabexpo Com Content Dam Mathworks Mathworks Dot Com Images Events Matlabexpo Us 18 Autonomous Navigation Using Model Based Design Pdf

An Easy Tutorial On Lidar Odometry Using Iterative Closest Pointbot Blog
Mapperbot Iscan Open Source Integrated Robotic Platform And Algorithm For 2d Mapping Springerlink
Sensors Free Full Text Integrate Point Cloud Segmentation With 3d Lidar Scan Matching For Mobile Robot Localization And Mapping Html

Build A Map From Lidar Data Matlab Simulink
What S New In Matlab And Simulink Segment And Register Lidar Point Clouds Lidar Based Slam
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Pdf A Simultaneous Localization And Mapping Slam Framework For 2 5d Map Building Based On Low Cost Lidar And Vision Fusion

Lidar Map For Different Robot Trajectories Green Color With Ros Download Scientific Diagram
Utm Arc Nasa Gov Docs 17 Hening Scitech 17 0448 Pdf
Ppt Slam Robot Using Ros Lidar With Raspberry Pi Matlab Powerpoint Presentation Id
Aerial Lidar Slam Using Fpfh Descriptors Matlab Simulink
Lidar Point Cloud Github Topics Github
我用matlab撸了一个2d Lidar Slam 扫描
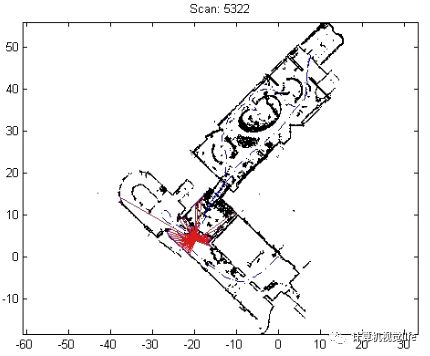
我用matlab撸了一个2d Lidar Slam 扫描

What Is Slam Simultaneous Localization And Mapping Matlab Simulink Matlab Simulink



